数字操控体系能给规划人员带来许多优势,比方它能履行高档运算并下降成本。因此,在履行数字马达操控体系时,数字处理器的挑选就成为需求考虑的首要问题。
实践国际中的信号在时刻上是接连的,而另一方面,信号数字化表明的精细有限,并且采样时刻上不接连,因此导致了量化。显着的量化源包含ADC,具有截位、舍入、溢出差错特性的核算引擎以及脉宽调制(PWM)发生器。
运用更长字长的ADC可将ADC的量化差错最小化(嵌入式操控器中一般选用的是12位ADC)。别的规划者也需求留意采样多个电流时会发生的差错。假如运用一个ADC来接连采样两个电流,那么所发生的差错就能得到约束。
假如运用带双取样和坚持电路的ADC,就能够防止这种差错。算法的数值表明是量化效应存在的最要害范畴。一起运用模仿和试验剖析法来研讨实践的数字操控器,是一种剖析量化差错的有用办法。下面图1所示的体系就选用了模仿履行和试验履行。
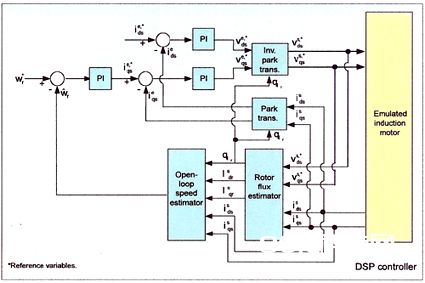
图1:数字处理器的挑选是履行数字马达操控体系时需求考虑的一个首要问题
该体系的算法选用了三种格局:16位定点、32位定点和32位IEEE-754单精度,全都运用了同一种32位定点数字操控器-TI公司的TMS320F2812,以及用于32位定点编程的TI“IQmath”库。
“IQmath”库让规划师能够轻松快速地将以浮点格局编写的C言语代码转换成32位定点格局。因为在定点处理器上履行浮点演算功率不够高,浮点格局的完成需求更长的4kH的采样时刻。因此,为公正起见,试验成果将只在16位和32位定点格局之间进行比较。
为了比较三种数据格局对数值精度的影响,对估量的速度响应和相应的d轴和q轴参阅电流别离进行了调查。
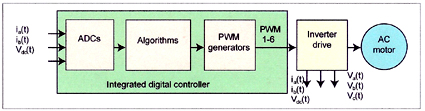
图2:一起运用模仿和试验剖析法来研讨实践的数字操控器是一种剖析量化差错的有用办法
16位定点体系(上图2)呈现了伪瞬态和振铃现象,而32位则没有。试验的成果也显现了类似的特征。在实践体系中,这些瞬态现象会带来可闻噪音和振荡(如下图3)。
采样频率任何数字体系都有必要考虑的一个要害因素是采样频率-奈奎斯特定理。有必要得出体系中最高的频率重量。一般做法是为一阶体系挑选至少4倍的频率。为了展现这一作用,咱们分解了一个简略的单极传输函数。该传输函数用公式表明为:G(s) = s + 100/100在恰当的采样距离中,系数没有问题。但当采样过度时,就会发生严峻的分辨率问题。查看一下系数巨细,就能发现量化效应。跟着采样率的进步,分子系数会下降。
当采样率为10微秒时,系数下降到了0.00099950016,显现为0x0020。这意味着系数有一个5位的分辨率,这对16位处理器来说是个严峻问题。此刻,假如选用32位运算,能够取得更好的数值。在这种情况下,一个能够用原生32位表明分数的32位处理器,如TMS320F2812,就能够防止这些问题。
发生PWM输出嵌入式操控器中的数字脉宽调制器(PWM)运用一个计数器和一个比较缓存器来发生PWM输出。但这种计划有它的缺陷:PWM输出中最小的改变等于计数器的时钟周期,当PWM频率添加时会带来量化问题。
这一点在操控与马达操控反相器相关的功率因子校对阶段时特别重要,在这种情况下,超越200kHz的PWM频率都是很常见的。此刻100MHz组件的PWM分辨率约为8到9位,会发生极限周期的问题。而TMS320F280x数字信号操控器初次完成的高分辨率PWM架构就能够处理这个问题,这种架构能够供给150ps的分辨率。
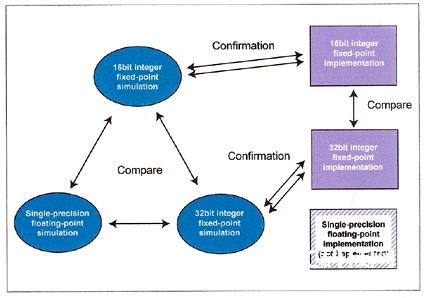
图3:该体系别离用了模仿完成和实践完成,其间的算法用16位定点、32位定点和32位IEEE-754单精细度浮点三种不同格局完成
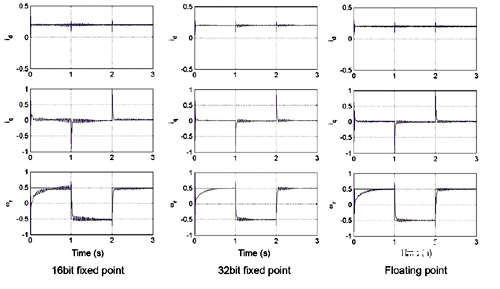
图4:16位定点体系呈现了伪瞬态和振铃现象,而32位则没有
上面的图4显现了运转中的高分辨率PWM和规范PWM。从软件曲线中能够看出,当高分辨率功用封闭时阶梯就会发生。
而当敞开高分辨率功用时,就形成了黄色曲线。很显着,高分辨率PWM能够将PWM输出中的量化差错下降几个数量级,因此明显下降由较低分辨率的PWM引起的极限周期。
而当敞开高分辨率功用时,就形成了黄色曲线。很显着,高分辨率PWM能够将PWM输出中的量化差错下降几个数量级,因此明显下降由较低分辨率的PWM引起的极限周期。
体系规划人员能够运用32位运算来改善马达操控体系的功能。并且,32位运算可让规划者无需再具体查看算法的量化问题,使他们能够运用更高的采样率,然后提高体系带宽。为了充沛了解量化效应并取得最好的功能,规划人员有必要经过高分辨率PWM这样的技能改善来恰当处理输出量化的问题。