依据美国动力局的核算,全球的动力约一半是被电机所耗费,因而怎么改进电机操控体系的耗能便成为一个重要的课题。要下降电机的耗能,除了电机由沟通电机走向直流无刷电机(BLDC)及电机本体的能效规划由IE1走向IE3之外,最重要的便是要有一个高性价比、高性能,且彻底针对电机操控的专属微操控器。
藉由一个针对电机操控的专属高性能微操控器,即可完结先进的操控算法。导入先进的操控算法,除了能够让体系到达节能之外,亦能够让整个操控体系在无传感器的情况下,因应负载的改变做出快速滑润的反响。传感器的装备,会添加组件及制作本钱,并且许多场合是无法放置传感器的,例如当压缩机内有化学物质以及一些产品因空间太小而无法放置。本文便是运用一个32位微操控器来完结先进的磁场定向操控(Field Oriented Control,FOC)、高频电压注入技能及空间矢量PWM(SVPWM)操控。
FOC
FOC又称矢量操控(Vector Control),FOC创造的初衷,就在于想把沟通电机的操控办法转换成直流电机的操控办法,直流电机的操控较简略,经过励磁电流和转矩电流的别离操控,即可简略且精确地操控电机电磁转矩。
对感应电机进行磁场和转矩的解耦:沟通异步电动机调频时电压不变,磁场会发生改变,调压的时分不调频,磁场也会发生改变,因而V/F仅仅一种十分大略的操控磁场的办法,底子达不到磁场的精确操控;而FOC能够完结相对更精确的磁场操控,可是FOC需求较高运算才能的微操控器。图1是以伟诠电子32位微操控器为根底的FOC体系图,而针对内环每一次的ADC中止,进行如下动作:
· 运用Clarke改换,将相电流由静态的三相改换成静态的两相电流。
· 运用Park改换,将静态的两相电流转换成动态的两相电流(旋转坐标系)。
· 运用滑动模态(Sliding Mode)操控器,核算出电机的速度及方位。
· 运用P I 操控器,针对速度及电流进行操控。
· 运用Park逆改换,将动态的两相电流改换成静态的两相电流(中止坐标系)。
· 运用Clarke逆改换,将相电流由静态的两相改换成静态的三相电流。
· 更新PWM输出占空比。
· ADC中止完毕。
高频电压注入估量
电机的发动是P M S M 操控中的重要环节,PMSM的FOC体系经过施加与转子磁场相笔直的转矩电流来保证电机的顺畅发动,但这需求获悉电机初始方位。大部分无方位传感器操控无法预知转子初始方位,一般选用开环发动或许将电机定位到预订方位发动。开环发动因不同视点起转,常发生的情况有反偏、卡顿等情况,而电机预订位要求则在许多产品中是不适用的。
针对PMSM零速/低速下的无方位传感器操控(图1),为了处理低速时转子方位和速度预算不精确的问题,一般均选用由美国威斯康辛大学的M.Corley及R.Lorenz两位教授于1996年首要提出的高频信号注入法,现在研讨较多的是高频电压注入法。该办法是根据电机的凸极特性,在电机定子中注入高频电压信号,经过对高频电流呼应进行特定的信号处理(滤波、视点估量器)来取得转子方位信息。
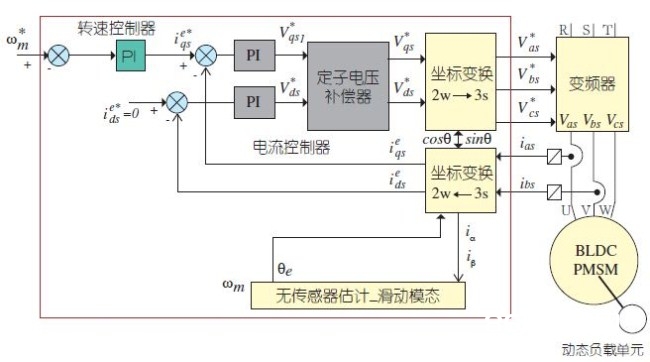
图1:以WT58F032为根底的磁场定向/无感测操控体系架构图。
依照电压注入办法的不同,高频电压注入法可分为以下两类:(1)旋转高频电压注入法—在定子坐标系中注入旋转高频电压信号,则高频电流呼应的负序重量中含有转子方位信息;经过对该信号进行解调取得电机转子方位。(2)脉动高频电压注入法—在预算的旋转坐标系注入脉动高频电压信号,则电流呼应的高频重量中将包含方位预算差错;经过对该高频电流信号的处理,使得预算方位收敛于实践方位。
空间矢量脉宽调制
空间矢量PWM (SVPWM)的作业原理是运用三组半桥逆变器,经由PWM调制电压矢量来组成电机定子电流。此组成电流在定子线圈上发生的定子磁通矢量与转子磁通相互作用发生转矩,使电机旋转。SVPWM因是以组成定子磁通矢量来决议三组半桥逆变器的切换时序,所以命名为空间矢量脉宽调制。这种调制办法是操控电压矢量使得电机气隙旋转磁通矢量轨道迫临一个抱负的圆,且有最小的磁通动摇,其转矩纹波(Torque Ripple)最低,因而在开路操控的情况下,电机转速动摇亦最小。表1为电机驱动电路的三组半桥逆变器功率开关器材,由于空间矢量脉宽调制开关操控并无上下开关一起导通的界说,所以实践上可视为两种状况开关时序(上开关OFF、下开关ON,或上开关ON、下开关OFF)。因而,三组功率开关器材,一共可发生八种开关状况组合。
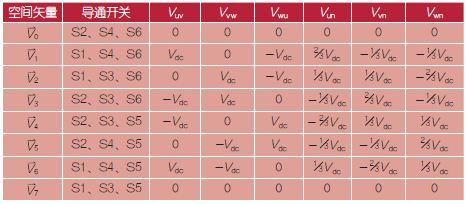
表1:SVPWM功率开关切换状况、线电压、相电压与空间矢量之联系表。
SVPWM操控体系
以伟诠电子WT58F032微操控器为根底的SVPWM操控体系,操控流程如下:
(1)主程序部分(Main Routine)。
① WT58F032复位;
② WT58F032芯片初始化设定;
③ 电机中止作业;
④ Check发动信号是否为“真”—如为真”,进入初始化电机装备及使能中止;如为“假”,则回到电机中止作业状况。
(2)中止服务程序(Interrupt Service Routine)。
① 中止服务程序发动;
② 输入捕捉单元/转子区间核算;
③ 上述“②”中核算的成果,输出给转速核算单元及电机相位核算单元;
④ 上述“③”中核算出来的转速,输出给电机相位核算单元及PID操控器;
⑤ 上述“④”中核算出来的电机相位及PID输出给正弦波发生器,以发生正弦波。
图2为根据WT58F032的SVPWM操控图2:WT58F032为根底的SVPWM操控输出波形。输出波形(M形状)。由图可看出,SVPWM的线电压运用率相较于一般的PWM会较高,因而能到达节能的作用。
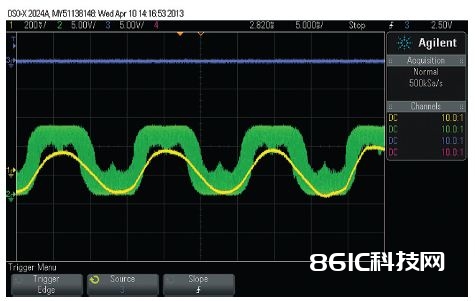
图2:WT58F032为根底的SVPWM操控输出波形。
总结
伟诠电子所提出的高性价比3 2 位微操控器, 除了有高运算才能的3 2 位R ISC CPU 及内置的一个在一个指令周期就可完结32b×32b乘法运算的快速乘法器外,亦集成了针对电机操控所规划的外围电路,包含高速ADC、高速及多形式操作PWM、PWM触发ADC、高速比较器、QEI等。别的,考虑到工业操控的需求,此芯片支撑宽压作业(可运转于2.0V~5.5V),且有极佳的抗噪声才能,十分合适用在高性能电机操控体系中。