跟着科学技能的不断开展,机器人技能在航天、海洋、军事、修建、交通、工业及服务业等范畴现已获得广泛的运用和开展。而在一些特别场合(如航天、深海作业及核工业等范畴),以无人探察车、无人排险车及无人运输车等为代表的机器人技能越来越遭到重视。为此,笔者规划了一种具有路途回忆功用、运用灵敏便利、运用规模较广的轮式移动机器人模型。
该机器人模型以微操控器MCU为中心,先由人对机器人模型依照所要行走的路途进行练习,即让机器人模型回忆该路途(将路途数据存储在存储器中)。今后机器人模型就可沿此路途重复行走。其回忆路途的办法灵敏便利,可依据不同的要求和需求对其进行不同的路途练习以完结不同的使命。
该模型可以运用于一些人类不宜活动或较难操控的场合(如微型核反应堆的金属罐管体系、火场勘探、辐射、消防、有毒、易燃、易爆物体场所的勘探等),也可作为室内服务机器人运用,以代替人完结家务劳动、厂区货品搬运、医院病历及材料的传递等。
该机器人模型具有以下特性:
●具有路途学习回忆和路途循迹重复功用;
●可模仿地图仿真练习,输出扩大倍数可按需求设定;
●在实践作业时,如遇到障碍物?可选用路途搬运法绕过障碍物并沿原学习路途继续行进;
●作业时无人操控;
●光线较暗时会主动翻开光源;
●行进间隔可用LCD实时显现;
●运动状况可用指示灯实时显现;
●具有体系毛病报警功用。
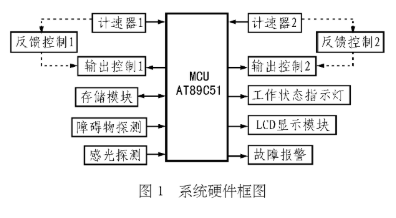
1、体系硬件规划
体系硬件规划框图如图1所示,中心操控部分选用Atmel公司的普及型8位MCU AT89C51。作为一款现在广泛运用的MCU,AT89C51供给有电机操控、LCD驱动显现以及传感信息等多种驱动功用和接口,另一方面,该MCU价格低廉,有很高的性价比。外接存储模块选用容量为256kB的24LC256闪存芯片,当然,也可以依据实践需求选用其它容量的闪存芯片。感光勘探选用光敏电阻即可感应外界光线的强弱。障碍物勘探选用美国邦纳工程有限公司的PicoDot PD系列激光传感器,该传感器能对被测物体进行准确的到位检测、定位和计数。
2、体系规划关键
轮式移动机器人模型的速度及方向可由两个后轮作为驱动轮来操控,MCU经过驱动芯片L293B驱动两个后轮电机。AT89C5可经过两个后轮对应的两个计速器来别离操控这两个后轮的转速,然后完结模型的行进和转向功用。
2.1 计速部分
体系计速部分由光电开关及带有均匀分布小孔的圆盘组成,其电路及皮带轮衔接示意图如图2所示。当光电开关中心有黑色物体挡住时,输出电平为0;无遮挡时,输出电平为1。当均匀分布小孔的圆盘边际在光电开关的槽中滚动时,可依据输出的一系列脉冲及圆盘上的孔数计算出圆盘的转速N。皮带轮1与圆盘粘在一同,因此转速相同;皮带轮2与模型后驱动轮同轴,速度相同;皮带轮1、皮带轮2由皮带相连。假定皮带轮2周长是皮带轮1周长的5倍,则皮带轮2的转速为N/5,即车轮转速为N/5。
2.2 路途学习回忆
计数芯片选用7级二进制串行计数器CD4024,光电开关的输出波形经施密特触发器整形为规范脉冲波形可使CD4024计数更便利。设每隔T时刻记载到脉冲数M,那么,T时刻内圆盘转速N=M/(LT)(设L为圆盘上的孔数),则车轮的速率为N/5=M/(5LT)。因为T越小,成果越准确,故T取几至几十毫秒。记载的数据经微操控器MCU送至外接闪存24LC256储存起来,供输出运用。
经过上述进程可对模型进行路途练习,即每隔T时刻将两个后轮速率别离记入闪存。练习完毕后,闪存内存储的是两个后轮每隔T时刻一次的速率,这样就可完结对练习路途的回忆。
2.3 路途循迹重复
在对该模型进行输出操控时,先由微操控器MCU从闪存中读取数据,再将每隔T时刻的转速数据经过脉冲输出,并经过L293B芯片驱动两后轮电机的滚动。为确保输出的转速与原记载的转速共同,可用反应操控的办法在后轮驱动电机滚动的一起,由计速器模块一起检测两个后轮的转速,然后别离比较两个后轮的转速是否与原记载转速相同:若小于原记载转速,可调用加快子程序;若大于,则调用减速子程序。
因为计数时刻T较小,再加上反应操控的效果,就可确保输出的运动轨迹准确接近于原练习路途,差错很小。实践运行时,可在确保记载和输出精度的前提下把练习的路途模仿成与实践路途按份额缩小的地图,即在地图上对模型进行路途练习,按份额倍数扩大输出,即可使机器人在实践路途上按练习路途运动。因为输出扩大倍数由程序决议,因此可按不同的需求设置,灵敏性很高。

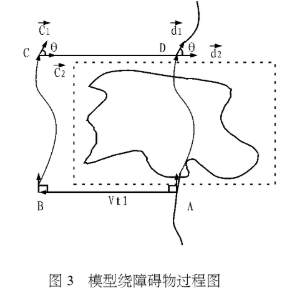
2.4 路途搬运法绕障
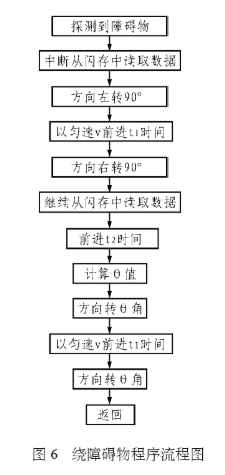
该机器人模型在练习完结后,即可从预设地址开端行走。模型在行进进程中,当传感器勘探到前方有障碍物时,可调用绕障碍物程序绕过障碍物并回来到原记载路途继续行进。其绕障进程示意图如图3所示,当模型传感器在A点勘探到前方有障碍物时,会将障碍物模仿成一边与其时模型方向笔直的矩形物体(见图中虚线矩形)。然后中止从闪存中读取路途数据,并使模型在A点左转90,接着以匀速v直线行进t1时刻到B点,再在B点右转90,接着从原中止处调用原记载路途数据行进t2时刻抵达C点。之后再在C点以方向 C 1 滚动 C1与 C2方向的夹角θ(θ=90-两车轮行进间隔差/两车轮间隔),模型方向 从 C1滚动到 C2 ,然后再以匀速v直线行进t1时刻到D点,此刻方向为 d2方向,然后再以C1到C2的相反方向从 d2转θ角到 d1方向,即 d1 // C1。实践上,在没有障碍物的状况下,模型依所记载路途应沿AD段行进,抵达D点方向为 d1方向。由图可见,BC段的运动状况彻底等同于AD段的运动状况,也就是说,在遇到障碍物时,机器人会将AD段搬运到实践的BC段运动以绕开障碍物,一起坚持它应有的运动状况并回来原记载路途。其间t1、t2的选取与虚线矩形的巨细(代表障碍物的巨细)有关,它可由传感器勘探到的障碍物巨细来确认。
2.5 附加功用
运用时也可依据特别需求,在模型上装置摄像机以实时调查或装置主动摄影的数码像机来记载作业区域周围的状况。当模型勘探到周围环境的光线比较暗时,还可由微操控器MCU翻开光源,以便为像机供给照明。
此外,模型上还规划了作业指示灯来实时指示模型的作业状况,不同指示灯别离指示其正常、左转、右转及犯错状况,以便利运用者及时了解模型的作业状况。外接LCD可实时显现模型的行进间隔,每个车轮行进的间隔=记载的车轮的转数车轮的周长,再取两个车轮行进间隔的平均值作为模型的行进间隔,这样可便利运用者及时了解模型的进程。
若模型在作业进程中产生毛病(如不能行进、失控等),也可经过警铃和警灯提示用户及时检修。
3、体系软件规划
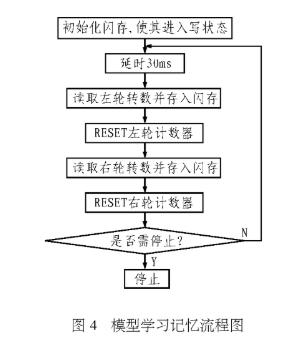
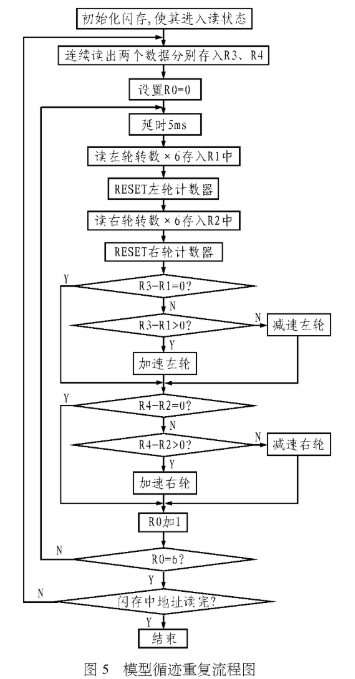
图4、图5别离为机器人模型路途学习回忆、循迹重复的软件流程。本程序中,路途学习回忆时的记载时刻间隔T取30ms,输出操控时,在每一个记载周期内比较6次(每5ms计一次数,再乘以6与原记载数比较较,以判别应加快仍是减速),以使输出更准确于原记载数据。图6为绕障碍物程序流程图,其间模型方向转过必定视点可由一轮停止、另一轮运动时的两轮间隔滚动角弧度的间隔来完结。
4、完毕语
该机器人模型比较无线遥控操作机器人的优势在于,可作业在电磁波屏蔽的场合;而比较有线遥控操作机器人来说,其长处是作业进程中无需人实时操控,可自主完结活动,并具有活动精度高、效率高的特色;比较固定轨迹机器人,该模型可以脱节固定轨迹的约束,其活动路途灵敏易变,习惯规模更广
责任编辑:gt