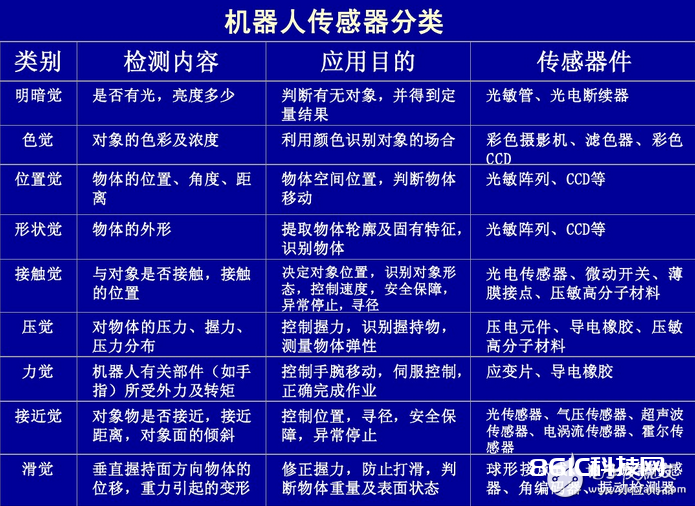
规划一款能够寻线,冲线并在进程中完结投球功用的机器人,需求传感器 技能的支撑,在试验中机器人的全体结构中设备了三个红外传感器和一个光感传感器,这儿首要剖析各传感器的实践运用总结。
技能的支撑,在试验中机器人的全体结构中设备了三个红外传感器和一个光感传感器,这儿首要剖析各传感器的实践运用总结。
本论文首要介绍是以单片机ATmega16为智能操控体系中心,在移动的机器人体系中运用光感传感器完结机器人对障碍物的一系列行为;经过红外传感器完结机器人在移动进程中对黑色胶条的寻线,转弯的进程。
1.红外传感器的运用
红外传感器一般是由光学体系,勘探器,信号调度电路及显现单元等组成的。红外勘探器是红外传感器的中心,它是运用红外辐射与物质相互效果所呈现的物理效应来勘探红外辐射的。天然界中任何物体只需温度高于绝对零度都能发生红外辐射,并且温度越低的物体辐射的红外线波长越长,根据需求经过调理光晕的巨细准确度选择性的承受某必定范围内的波长就能够到达丈量的意图,红外传感器能把红外辐射量改变转换成电量改变。
本次试验中咱们用的SHARP电红外传感器,它的制造简略,成本低,设备比较便利,功能安稳,可是由于长时刻的运用,其精度有所下降。
在机器人跋涉中,咱们凭借红外传感器和地板上的色带轨迹能够沿着既定道路主动跋涉,途径可任意,由于咱们机器人的展现在室外,机器人在辨识途径时,或许遭到天然环境下可见光的影响,导致光感传感器辨识禁绝,而红外传感器能够滤除天然光照条件下的各种光,能够使得反应值的准确性大大添加。
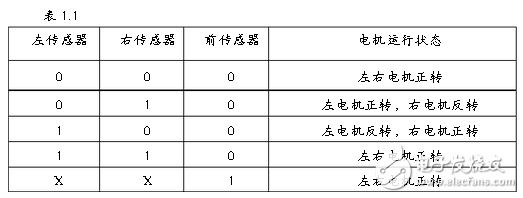
由于咱们的轨迹线是黑色的而两边是白色的,左边的传感器操控右电机,而右侧的传感器操控左电机。假定机器人的纵轴中线向左违背黑色轨迹线时,其间右侧传感器的光电管勘探到轨迹线反射回来,是该传感器输出为高电平,而左边传感器仍保持原状况,输出为低电平。经过与程序中的数值比较(见表1.1),此时应该反应的成果是左边电机正转,右侧电机回转,使得车身相反方向滚动(视点能够经进程序操控,且转视点越小,跋涉进程中越准确,时刻中止越小),这样违背的方向能够批改。在纠正途径中,两只电机不断替换作业,是机器人实践上是紧靠着轨迹线向前方进行“之”字形运转的。咱们的机器人上的第三只传感器作为冲线设备运用,它的优先级比别的两个要高,当其反应一个高电平今后,其他两个传感器的反应信号直接屏蔽,机器人直线运转冲出终点线。
由于第三只传感器优先级的问题咱们再规划中结构和视点的规划,需求不断在试验中修正,以到达最满足咱们要求的精度。
2.光电传感器
光感式传感器是根据光电效应的传感器,在收到可见光照耀后即发生光电效应,将光信号转换成电信号输出。光电传感器一般是由光源,光学通路和光电元件三部分组成。光强,光线的遮挡,透射,反射等丈量多种物理量,如尺度,位移速度,温度等,也因而这是一种运用极广泛的重要灵敏器材。
咱们在试验中运用的是反射型光电开关,它在光电器的一端有两个感受器,一个是发射器,一个是接收器。若再在发射器延伸的必定范围内,若无障碍物,则不会发生任何反应,处于低电平状况,机器人的机械臂仍保持原状况;当其方向上发生障碍物遮盖,则会在传感器和遮挡物之间构成光线反应到接收器上,光电器会发生一个脉冲反应回cpu,使得机械臂发生动作。
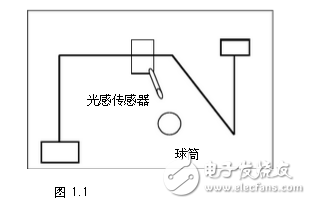
机器人的跋涉中,考虑到机械臂在履行一系列动作时会发生必定时刻的延时,故咱们将光电传感器成45度角向前歪斜,提早感知圆柱筒,当光感器感知遮盖物时,机械臂进行回转,并将爪中的小球投入圆筒中,完结投球动作。(图1.1)
在不断的试验丈量中,咱们不断调整机械臂的高度,光感器的视点,与遮盖物的间隔,以到达最好的丈量效果,使小球准确的投入前提下,尽量不减缓小车行进的速度。
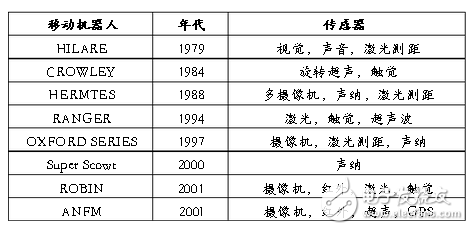
以上两种仅仅咱们在制造简易的移动机器人中传感器的运用,在实践的试验室创造中还会用许多不同品种的传感器。机器人是一门触及技能范畴十分广泛的学科,其间传感器和操控技能是中心的技能,所以绝大部分机器人运用中都能够看到传感器的存在,所以多传感信息交融技能在机器人范畴有着宽广的运用远景。而最杰出的,应该是许多研讨机构为了讨论多传感器数据交融的一般规则而在试验室规划的各种可移动器人或各种环境下的主动驾驶设备。从网上搜索了一些多传感器交融的比较闻名的著作 。
而这种多传感器信息交融体系与单传感器信号处理方式比较,多传感器信息交融体系能够有用的运用传感器资源,能够更大程度的取得被测方针和环境的信息量。多传感器信息交融和单传感器信号处理办法之间也存在实质的差异,其关键在于信息交融所处理的多传感器信息具有更杂乱的局势,并且能够在不同的信息层次上呈现。
多传感器信息交融的根本方针是根据各传感器别离观测信息,经过对信息的优化组合导出更多有用信息,这是最佳协同效果的成果。它的终究意图是运用多个传感器一起或联合操作的优势,来进步整个传感器体系的有用性。
多传感器信息交融技能在移动机器人中的运用现在已开展成为一个抢手的研讨范畴,为移动机器人探究不确定和不知道环境供给了一种技能途径。而移动机器人是一个多学科穿插开展的范畴,如今仅仅规划了比较底层的机器人硬件和软件,今后需求完善这些理论和成果,此外,还有许多问题需求持续深化的研讨。