


近来,通讯和导航工程师越来越倾向在全球定位体系(GPS)中选用软件技能。1,2 由于超大规模集成电路的开展,功用强壮的CPU和DSP能够经过软件对GPS信号进行实时检测和解码。这些依据软件的GPS接纳机具有适当强的灵敏性:只 需修正设置参数即可习惯新的运用,无需从头规划硬件,挑选一个IF,就可完结进一步的体系升级。
运用MAX2769 GPS接纳机RF前端芯片,简略的USB DONGLE或PCI Express?(PCIe?)迷你卡就能够为膝上型 PC添加低成本的GPS 功用。MAX2769将接纳到的原 始数据传输到PC主机,PC主机运用软件完结基带解 码,然后省去了单机GPS体系所需求的基带ASIC的成 本。简略的说,MAX2769使规划人员能够运用单芯 片完结GPS和Galileo体系信号处理的适配器。 本文给出了GPS体系的作业状况概述,并详细描述了 Maxim的依据软件的GPS接纳机计划。
GPS信号发生器
GPS体系包括24颗空间卫星或空间运载器、地上操控站以及用户设备(接纳机)。关于民用GPS和Galileo体系,这些卫星经过频率为1.57542GHz的L1波段进行通讯。3 GPS 接纳机有必要捕获到至少四颗卫星的信号才干进行牢靠 定位,信号捕获和盯梢十分杂乱,由于每颗卫星和接 收机的方位时刻都在改变。
GPS体系实践上是一个简略的扩频通讯体系。4 图1提 供了一个民用GPS体系的信号发生电路。首要,50bps 的导航信息重复20次,构成1000bps的比特流。然后 这个重复信号被长度为1023码片(伪随机噪声(PRN)码的码速) 的仅有粗/ 捕获码( C / A ) 进行扩频, 构成 1.023Mcps的基带信号。此用这种扩频办法后,43dB 巨细的GPS体系的总处理增益(G)能够很好地恢复比 热噪声电平低得多的信号。
每颗卫星都有仅有的C/A码或许说Gold码。5 由于具有 很好的自相关和互相关性,Gold码被广泛用于各种 CDMA通讯体系,如WCDMA和cdma2000?。基带信 号经过二元相移键控(BPSK)调制后被上变频到L1波 段进行传输。
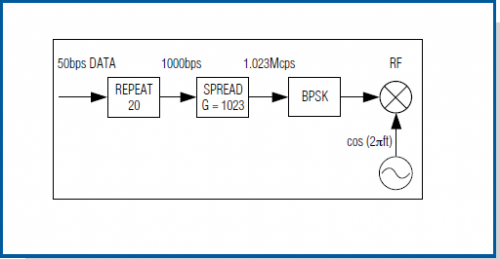
图1. 民用GPS信号发生器选用扩频技能发送信号。
信号取样办法剖析
由于GPS是一种CDMA通讯体系,所以作为解调数据 的先决条件,接纳机有必要与PRN码进行同步。完结代 码同步一般需求两个进程:用来完结粗对准的代码捕 获和用来完结精密对准的代码相位盯梢。6 更明确地 讲,GPS接纳机有必要首要确认它对某颗卫星是否具有 视距上的可视性。咱们知道,每颗卫星都由仅有的 C/A码来差异。当卫星可视时,由捕获进程判别信号 的频率和代码相位,然后确认相应的解调参数。由于 存在多普勒效应,依据卫星相关于接纳机的速度,接 收信号的频率一般会偏移标称值5kHz到10kHz。
在接受器端,GPS信号首要被下变频到同向和正交 (I和Q)重量信号。再由一对I-Q相关器将I/Q基带信号 与本地PRN序列进行相关运算。经过一个比特周期的 积分后,I-Q相关器的输出被累加起来以供给输出断定变量。
只需断定变量超越必定的门限,体系就以为成功地实 现了捕获,继而进入盯梢形式。不然,就经过调理本 地PRN序列的相对相位和振荡器频率,来更新断定变 量,并重复上述进程。
串行查找办法的简略逻辑结构使它十分合适用ASIC 完结,而用软件完结就不切实践了,由于查找空间非 常大。假定体系答应500Hz的载波频率偏移,多普勒 频率是10kHz,软件完结需求的查找空间大约为 2 x (10,000/500) x 1023 = 40,920。很明显,用软件完结串行查找捕获比较困难。
别的一种更简略的软件捕获办法叫做频域并行代码相位捕获。这种办法将多普勒频率和代码相位查找兼并起来,在经过PRN码的快速傅立叶改换(FFT)后,将一切代码相位信息转换到频域内。这样咱们只需求查找多普勒频移上的空间即可,因而这是一种快速高效的软件查找办法。
首要,将输入信号与本地正弦和余弦载波(同向I和正交Q信号重量)别离相乘。然后把I和Q重量兼并成一个复合信号输入到FFT模块。傅立叶改换的结 果再和PRN码的FFT改换成果相乘(PRN生成器发生代码相位为零的代码)。实践上,FFT运算和PRN码的发生能够选用列表的办法,以下降运算的杂乱 性。
终究,输入信号与本地代码的乘积(该乘积代表了输入信号和载波频率的相关性)被送到傅立叶逆改换模块,该模块的自乘输出成果再被反应到断定逻辑。基 于FFT的频域核算被证明具有较小的运算量。例如之前说到的那个比如, 捕获运算的杂乱性大约为20,000/500 = 40个FFT运算操作。
串行查找办法具有简略的逻辑和操控架构,十分合适ASIC完结。但是,巨大的查找空间添加了软件算法的杂乱性。所以关于软件GPS接纳机来说,串行 查找办法并不是一个好的挑选。相反,并行代码捕获办法的低杂乱性使它很合适用软件完结。但是,它的逻辑架构远比串行查找办法杂乱,因而很难用ASIC实 现。
盯梢细调
捕获进程建立了对GPS信号的频率和代码相位参数的粗校准。因而,盯梢的意图是进行细调,以便体系能用准确的代码相位和频率信息解调出数据。盯梢包括代码相位盯梢和载波频率盯梢。
代码盯梢用延时锁相环(DLL)完结,如图2所示。DLL电路把输入信号乘以PRN码的三个仿制码(距离±0.5码片),这三个仿制码别离代表和输 入信号比较提早、按时和落后抵达。经过归纳后,这些信号别离代表输入信号和本地仿制码之间的相关性。具有最高相关值的信号被选中保留下来(图3)。
载波频率盯梢由锁相环(PLL)或许Costas环路完结。8载波盯梢的意图是把本地频率调理为输入信号的实践频率。
当捕获和盯梢进程建立起初始同步后,体系能够解码出导航比特。将1.023Mcps的输入信号解扩为1000bps的比特流后就开端解调数据。然后 运用比特同步从1000bps的数据流中恢复出50bps的信息。比特同步需求经过寻觅零穿插沿(0V)来辨认比特流的开始方位。
假如这个穿插沿是已知的,咱们能够用20ms的距离切割1000bps输入流,由于导航数据信息(50位)的持续时刻为20ms。终究,以20ms距离摆放的比特取样累加起来取均匀值,然后解码出导航数据。

图2. 运用延时锁相环作代码盯梢协助细调,以便体系能用准确的代码相位和频率信息解调出数据。

图3. DLL电路把输入信号乘以PRN码的三个仿制码(距离±0.5码),这三个仿制码别离代表和输入信号比较提早、按时和落后抵达。具有最高相关值的信号被选中保留下来。
依据软件的GPS接纳机
传统的GPS接纳机选用AS%&&&&&%完结信号捕获、盯梢和位同步操作,而软件GPS接纳机用软件代替硬件完结这些功用,因而具有更高的灵敏性。经过简化 硬件架构,依据软件的规划能够进一步缩小接纳机尺度,下降成本,并具有更高功率。程序能够运用C/C++、MATLAB®或其它言语编写,并可移植到各种 操作体系中(嵌入式操作体系、PC、Linux和DSP渠道)。由此看来,软件GPS接纳机能够为移动终端、PDA及其它类似设备供给最大的规划灵敏性。
关于膝上型电脑,规划人员能够规划USB dongle (可合作任何带USB端口的膝上型电脑一同作业)。关于新一代带有PCIe迷你卡衔接器的膝上型电脑,能够把RF前端置于PCIe迷你卡上,并把它刺进 PC内部(图4a,图4b)。PCIe迷你卡接口包括一个USB口,因而,前端适配器规划关于USB和PCIe迷你卡而言十分类似。
首要差异在于:支撑PCIe需求不同的电源办理逻辑电压,需求处理不同的直流电压(PCIe为3.3V,外部USB端口为5V)。
从图5b所示USB dongle框图能够看出该计划十分简略,只运用了一个通用GPS接纳器MAX2769、一个计数器和USB接口操控器,即可捕获信号,并将其转换成数字 信号,终究传递给PC主机。然后,经过运转PC主机软件履行一切基带功用,将定位信息显现在PC 显现器上。这样,笔记本PC 便成了一个强壮的GPS设备,可支撑导航和依据定位的服务。
GPS前端经过工业标准USB 2.0接口把数字化的IF数据传输到笔记本电脑。软件基带程序运用输入数据核算出方位方位并随后履行盯梢进程。Geotate是可选的一个软件来历。
为供给通用接口,此软件能创立一个虚拟COM端口,使其能够衔接到许多现有的导航和定位运用。大部分GPS软件包接口契合NMEA 0183标准,一般都能够运转在Microsoft的Windows® XP和Windows VistaTM操作体系中。别的,此软件能够处理一切可得的辅佐数据,此数据能够从工业标准协议或许用户专有的接口获得。
当时的膝上型电脑里所带的CPU均具有满意软件GPS接纳机实时解码所需的运算才能。当在1GHz Pentium®M体系中,盯梢进程中均匀处理器负载大约为6%;而在2.18GHz CoreTM Duo处理器上,在履行每秒更新时,处理器负载一般低于5%。跟着算法的开展,有可能把CPU的运用率下降到2%以下。
电路作业和功用
依据软件的GPS接纳机RF前端首要运用低噪声扩大器(LNA)扩大弱小的输入信号,然后经过下变频将信号转换到较低频率(4MHz左右)的IF (图5a)。下变频器选用一路或两路混频器对输入RF信号和本机振荡器信号进行混频,经过模/数转换器(ADC)把生成的模仿IF信号转换成数字IF信 号。
MAX2769将一切功用电路(LNA、混频器和ADC)集成到一同,可大大缩短产品的开发时刻。该芯片供给了两个LNA:其间一个LNA具有低至 0.9dB的噪声系数、19dB 增益、-1dBm的IP3,可合作无源天线运用;另一个LNA则具有1.5dB的噪声系数、较低增益/功耗和较高的IP3,可合作有源天线运用。2.8V 供电时,耗费的电流最小,且仅为13至18mA,详细取决于电路装备。

图4. 针对USB dongle (a)、PCIe迷你卡(b)的典型适配器结构,为两种计划均可供给了简略、低成本的规划。
RF端,在扩大器之后一般运用外部RF滤波器。然后运用集成的20位,Σ-Δ N分频合成器和15位整数分频器将信号直接下变频到0至12MHz所要求的IF频率。IF滤波器的挑选规模较广,能够习惯不同的架构,例如Galileo。
从RF输入至IF输出的总增益能够在60至115dB规模内调理或进行主动操控。输出能够挑选为模仿、CMOS或有限差分。内部ADC具有可设置的一到三位输出。集成参阅时钟振荡器能够运用晶体或温补晶振(TCXO),也能够运用8至44MHz频率规模的输入参阅时钟。
咱们运用MAX2769和作业在24MHz参阅时钟的CypressSemiconductor的USB操控器构建了一个简略的USBd o n g l e 参阅规划(如图5 b 所示)。该规划运用一路MAX8510 LDO调理直流电源。经过3线(SPITM)数字总线对MAX2769的寄存器进行编程。体系也能够在没有SPI操控的情况下作业在八种硬件形式的恣意一 种。
芯片内的电路对有源天线进行偏置,关断形式下将天线封闭,满意USB标准。MAX2769能够检测到天线电源是否有电流耗费,并主动切换LNA1和 LNA2,关于能够刺进灵敏度更高的有源天线代替无源天线的运用,这是一个十分抱负的功用。规划人员只需求把外部天线端口衔接到LNA2,把内部端口衔接 到LNA1。
刺进外部天线时,MAX2769将检测到吸电流,可主动由LNA1切换到LNA2。
MAX2769为膝上型电脑、手机、PDA和轿车运用供给了一个高功用、紧凑的解决计划。运用现已商用化的GPS软件包,115dB的总电压增益和1.4dB的模块噪声系数能够到达-143dBm 的捕获灵敏度和-154dBm的盯梢灵敏度。
定论
软件技能可完结简略的、低成本GPS运用。为支撑这些可能性,MAX2769为软件GPS接纳机和传统的硬件完结办法供给灵敏的频率规划。当然,每 种计划都有正反面—软件GPS接纳机需求高功用的处理器和适量的内存。但是,跟着软件的开展,对时钟、数据更新速率进行合理的挑选,需求的内存能够最小 化。

图5. (a)软件GPS接纳机中,需求对捕获的RF信号进行扩大、变频、数字化。(b)实践接纳机中,低噪声扩大器对RF信号进行扩大,MAX2769对扩大后的信号进行变频和数字化处理。然后,经过计数器和USB接口操控器将数据依照USB协议传输给PC主机。






