


1.概述
自电机工程诞生以来,三相沟通马达一直是工业范畴的主力。它们牢靠、高效、费效比高,需求少数修理或底子不需求修理。此外,沟通马达(如感应马达和磁阻马达)无需与转子的电气衔接,因而很简单完成阻燃,用于风险环境(如矿山)。
为了供给恰当的沟通马达速度操控,有必要为马达供给三相电源,其电压和频率能够改动。这种电源将在定子中构成一个变速旋转磁场,使得转子依照所需的速度旋转,且滑动很小,如图1 所示。这个沟通马达驱动器能够高效供给从零速到全速的全转矩,假如需求的话,还能够超速,并且经过改动相位旋转,能够很简单使马达双向作业。具有这些特色的驱动器称作脉宽调制马达驱动器。
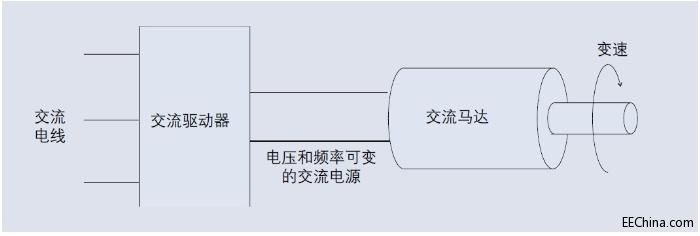
沟通马达驱动体系示意图
脉宽调制驱动器能够生成杂乱波形,如在到马达的输出上,以及到驱动器的电源上。本博文将分两部分,讨论马达驱动器的电气丈量论题。
2.对脉宽调制马达驱动器的丈量
表1 给出了脉宽调制马达驱动器的典型丈量。
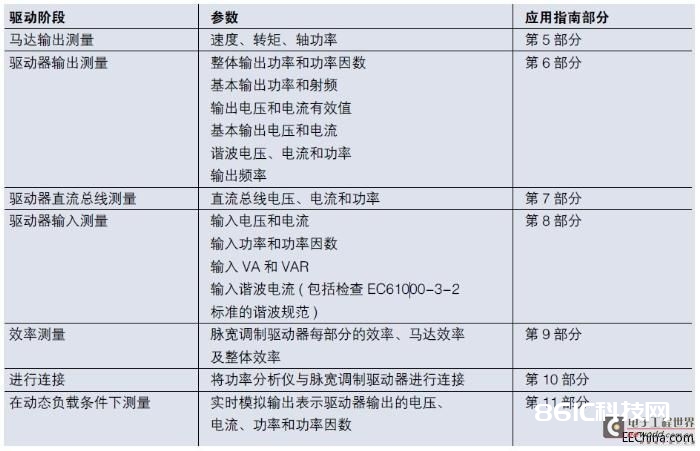
表1. 常见的脉宽调制马达驱动器丈量
3.马达输出丈量
图1 阐明,经过在马达输出轴装置转速和转矩传感器,能够对马达输出进行丈量。
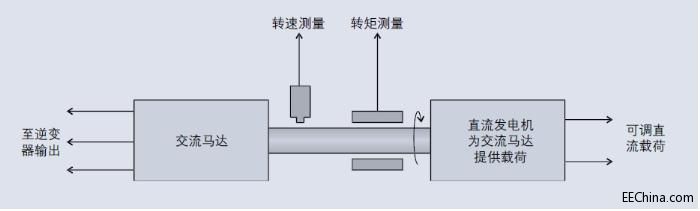
图1. 马达输出丈量
3.1转矩和转速传感器
转矩和转速传感器生成的电信号与转矩和转速成正比。经过丈量这些信号,能够确认马达的转速和转矩,从这些丈量成果中能够核算马达输出功率。
3.2转矩
马达转矩是在其输出轴上构成的旋转力,它是一个扭力,其单位是牛顿米(Nm) 或英尺磅(1 英尺磅 =1.3558 Nm)。关于小型马达而言,其转矩额定值低于1 Nm;关于大型马达而言,其转矩额定值到达几千Nm。
经过旋转应变计以及运用固定挨近、磁致弹性和磁弹性传感器,能够丈量转矩。这些传感器都是温度灵敏型的。旋转传感器有必要装置在转轴上,由于空间受限,这并非总能行得通。
为丈量转矩,应变计往往直接装置在转轴上。由于转轴旋转,转矩传感器有必要经过滑环、无线通信或电感耦合与外边国际耦合。
3.3转速
马达转速通常以每分钟转速(RPM) 来描绘,即它在1分钟内沿固定轴旋转的完整圈数。
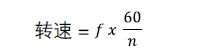
转速传感器输出可能是一个与转速成正比的模仿电压。更遍及的是,转速传感器输出是一个由马达转轴上圆盘生成的TTL 脉冲。经过丈量TTL 信号频率,并运用份额因数,能够确认马达转速。
例如,假如转盘每转一圈生成n 个脉冲,那么每分钟转速(RPM) 能够核算为:
3.4完成转矩和转速丈量与电气丈量相结合
为了确认马达和驱动器组合的功率,有必要考虑体系的电气输入以及在马达输出端生成的机械功率。马达输出功率是转矩和转速的乘积:
马达输出功率(W)= 转矩(Nm)× 转速( 弧度/ 秒)
= 转矩(Nm)× 转速(RPM)×
留意:1ft-lb=1.3558Nm( 牛顿米)
1HP=745.7W
经过以下公式,能够核算体系功率:
为了进行这些丈量,PA4000 包含传感器输入端,用于衔接转矩和转速传感器。经过丈量驱动器输入端耗费的电力、以及马达输出端的转矩和转速,运用一台仪器就能够丈量出体系功率。
4.驱动器输出丈量
脉宽调制驱动器的输出波形非常杂乱,由一系列高频重量( 因载波) 和低频重量( 因基波) 组合而成。
对大多数功率分析仪来说,这带来的问题是:假如在高频丈量,那么波形中的低频信息将丢掉;假如滤除脉宽调制波形在低频丈量,那么高频数据将丢掉。这个难题的呈现是由于在低频对波形进行调制。因而,高频丈量( 如总电压有效值、总功率等) 有必要在高频处进行,但有必要超出输出波形低频重量的整数倍。
泰克PA4000 功率分析仪运用脉宽调制输出丈量的特别作业形式克服了这个难题。它对数据进行高速采样,并实时核算整体数量,包含一切谐波和载波重量。与此同时,对采样数据进行数字化滤波,供给低频丈量,如输出频率的基波重量和丈量。

图2. 高精度PA4000 丈量技能
除了从同一丈量中取得低频和高频结构外,该技能答应高频丈量与低频信号同步,这是供给准确和安稳的高频丈量成果的仅有办法。
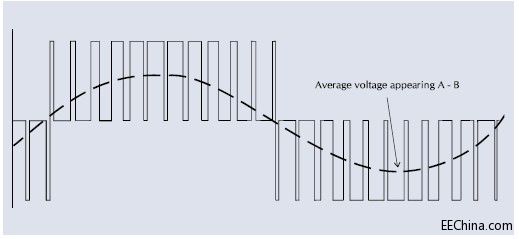
图3. 测得的一个马达绕组两头的净电压
依据丈量的输出频率规模,滤波器的挑选计划有3 种,拜见表2。

表2. 脉宽调制马达驱动器体系内不同频率规模运用的滤波器
滤波器的挑选并不影响较高频率重量的丈量,由于这些丈量是经过未经过滤的数据进行的。不过,为了优化低频丈量成果,您应当为运用挑选正确的滤波器。
5.运用PA4000示波器丈量驱动器输出
该仪器经过三相三线装备衔接至输出。( 又称作两表法。关于两表法的更多信息,请拜见运用攻略:三相丈量原理。) 关于输出电流高达30A 的脉宽调制驱动器,PA4000 能够经过其内部电流分流器,直接与驱动器输出相连,如图4 所示。






