


1. 导言
卡车、客车车辆在补修、段修和厂修时有必要检测车钩到轨迹的垂直间隔,为了便于连挂和行车安全有必要规则车钩高度(车钩中心线到铁轨上表面的垂直间隔)在必定的规模内[1> (客车:880mm,答应+10mm,-5mm 的差错;卡车:880mm,±10mm 的差错)。车辆在进行段修时,因为要对转向架、车钩若丈量禁绝,将严重影响列车的行车安全。而目前我国铁路各车辆段均选用比较原始的手艺丈量方法,差错大,功率低,费时又吃力,无法满意铁路列车高速重载的开展要求 [2>。针对以上问题,本文论述了车钩高度超声波丈量体系的功用原理及软硬件规划。
2. 作业原理
丈量体系选用超声波传感器,自车钩中心线向下竖直发射超声波,并由放置在铁轨面的的薄板反射回来,传感器接纳到回波,因为光波在空气中的传播速度必定,通过计时器所计得的时刻即可算出车钩的高度。图1 为测距原理的示意图。

图1 测距原理示意图
整个体系由丈量间隔的单片机操控和用于体系设备定位的机械部分组成。除了首要的高度测验功用,体系选用智能化、人性化规划,还具有以下几个特征:
(1)设有小键盘和液晶屏。用于操控测验及其他功用,液晶屏显现丈量成果,便利检查。
(2)单片机操控体系扩展一个存储器,可存储不少于1000 个测验数据。各个丈量数据都标有序号和相关的信息,便使用户查询。
(3)带有电源电量信息收集电路,并将电量信息显现在液晶显现器中,协助用户了解电量运用情况,并提示用户及时替换电池。
(4)体系规划了某些特殊情况犯错时的应急处理程序,最大极限地确保测验的牢靠和数据的安全。
(5)选用I2C 总线,可便利与微机衔接进行数据传送。
3. 硬件规划
硬件体系包含:单片机操控体系、超声波传感器、键盘和显现电路以及直流电源部分。其组成结构见图2。

图2 硬件体系结构
单片机为ATmega16L-8pu 型AVR 单片机;传感器选用美国邦纳Q45ULIU64ACR 型超声波传感器;显现器选用天正达TS12864 图形液晶屏,电源选用9V的电池。
Q45ULIU64ACR 型超声波传感器将丈量的间隔值转换为模拟量(电压或电流)输出。可检测规模为100mm~3.0m,分辨率为间隔的0.1%(最小0.25mm),线性度为满量程的1%,并带有温度补偿。因为车钩的标称高度大多在880mm 左右,答应检测差错为±0.2%,因而该传感器可以满意体系要求。Q45U传感器接线方法如图3 所示,图中棕线、蓝线和黑线分别为传感器电源正极、负极和电压输出。其间模拟量0~10V线性对应于必定规模的间隔值,其输出经分压电路(将0~10V降为0~5V以习惯单片机A/D转换器的输入要求)接入单片机的A/D 转换器。由A/D 转换器采样测得电压值,经程序处理得出高度值。
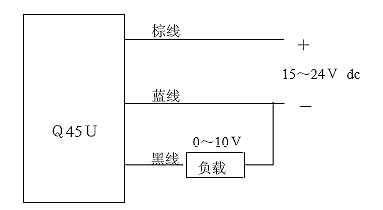
图3 传感器接线图
键盘设有体系发动键、测验键、保存健、查询、翻页键、删去键等功用键以便使用户的运用。图形液晶可显现中文、英文、数字等字符,用于显现欢迎界面、操作提示、测验成果以及电源电量等信息。电源电量提示功用可由A/D 对电源电压采样进行监测。当需要向微机导出数据时,可通过I2C 总线进行衔接完结通讯。
4. 软件规划
体系要求完结测距、保存数据和查询前史数据的功用。这些功用相应地在软件上进行规划。体系主程序的流程见图4。

图4 主程序流程图
按下开要害发动体系后,体系将进行各部件的初始化,等候键盘的输入。若按下测距键,体系将操控超声波传感器发射超声波,接纳回波,处理数据,得出丈量值并通过显现器显现出来,供用户保存或其它处理;若按下保存键,体系主动对丈量得到的数据进行保存供用户今后查询;若按下查询键,即可对前史丈量数据进行查询拜访,键盘上还设有向上和向下翻页的按键,便使用户查询。
依据上述内容,可规划如图5所示的测距子程序。

图5 测距子程序流程图
5. 试验成果剖析
表1为常温下在880±15mm 丈量规模的试验数据。通过很多测验试验,发现在丈量规模(本体系为100mm~1.4m)内体系丈量差错小于±3mm,而且丈量安稳,重复精度高,受环境影响小。由此可见只须正确操作,扫除人为运用不当形成的差错,体系的测验作用十分抱负。

表1 试验数据
6. 结束语
本体系使用现代超声波测距传感器,选用单片机操控技能对数据进行实时采样,滤波,并做数据处理,使用液晶屏显现,完结车钩与轨迹的垂直间隔的智能检测。本设备将具有体积小,精度高,功耗低,主动化程度高的特色,可作为现场检测人员抱负的便携式东西。






