


操控器局域网(CAN,Controller Area Network)是一种支撑分布式实时操控的串行通讯网络体系,具有很高的安全性,首要使用于嵌入式操控器的通讯体系和智能设备的开放式通讯体系,据统计,使用CAN总线后,整车线束连线可缩短200~1000 m,质量可减轻9-17kg,布线显着简化,可靠性和实时性明显进步。
1 商用车操控体系及其拓扑结构
商用车操控体系的操控目标包含:底盘体系、车身体系、发动机。如图1所示。
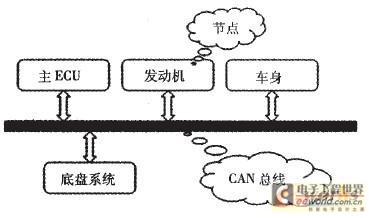
图1 商用车操控体系拓扑结构
2 商用车CAN总线数据的收集硬件规划
2.1 车身节点的数据收集
商用车车身体系需求收集的信号有左右门集控锁,电控车窗、雨刮器、前后车灯以及车内空调等。这些信号要求的实时性不是很高,能够选用B级网络。
选取89C52单片机作为此节点的CPU,SJA1000作为CAN操控器,82C250作为CAN驱动器(或收发器)。如图2所示。
商用车车身需求收集的信号较多,假如每个信号都设置一个CAN操控器和接口电路,形成本钱和空间很大的糟蹋,可设置几个四选一电路选取信号,如图3所示,终究通过几个四选一电路,选取一个信号,送给单片机进行信号收集,通过CAN操控器和接口电路,传输到CAN总线上。

图2 车身节点硬件原理图
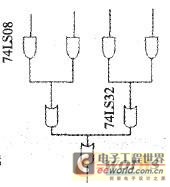
图3 四选一电路
2.2 发动机节点数据收集
发动机节点需求收集的数据有发动机的转速、车速、发动机的油量以及冷却水的温度,需求一个四选一电路。其间,温度和油量信号需求差动放大和V/F转化,转化成频率信号,如图4所示,便于单片机进行收集,其收集电路和车身收集电路相同。发动机转速和车速信号需求通过整形,然后才干输入单片机进行收集。其整形电路如图5所示。
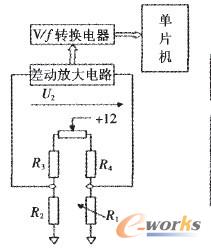
图4 油量收集电路
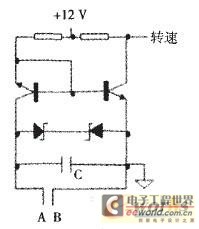
图5 整形电路
2.3 底盘节点的数据收集
本体系中商用车底盘节点首要是针对悬架体系来说的,为了改进车辆的行使平顺性和操作稳定性,所收集的信号首要是电控空气悬架体系的高度改变信号和空气绷簧的压力信号。空气悬架的高度改变由高度传感器来丈量,压力信号由压力传感器来丈量。
压力传感器和高度传感器都是电磁式的传感器,将压力的改变和高度的改变转化成电势信号输出。为了体体系一,将此信号通过差动放大和V/f转化,转化成频率信号,分时送给单片机进行收集。其收集电路和车身信号收集电路相同,不再赘述。这样,整个体系的信号收集电路做到一致。






