


在现有数控技能中,最常用的是单主轴的多轴联动数控体系。这种数控体系一般一次只能装夹加工一个工件。而在某些运用场合,需求进行工件的批量加工,单台数控机床的加工功率难以满意需求。虽然能够在单一主轴架上夹装多个主轴头,但因装置差错以及刀具犬牙交错,一起加工同一种工件时,为确保加工工件的共同性,在机床装置和刀具调整大将花费很多人力物力,运用很不便利;在另一些运用场合,关于同一工件,往往需求一次装夹后选用多把刀具多道工序轮动复合加工完结,每道工序只用其间一把刀具加工。现在,最常用的办法是装备刀库,刀库首要是供给储刀方位,并能依程序的操控,由换刀组织正确挑选刀具加以定位,以进行刀具交流[1]。经过主动换刀和工作台分度可对棱柱体类零件进行多工序(如铣、钻、镗、攻丝等) 和多面复合加工,然后处理机械制作企业交货期长、资源使用率低、在制品多和资金周转慢的问题。但无论是杂乱的圆盘式刀库,仍是较简易的直排刀库,这种装备刀库的办法对数控机床的制作要求较高,机床结构较杂乱,一起对数控体系的功用要求装备主动换刀体系,大大添加了体系本钱,刀具对刀预备时刻以及换刀时刻相应添加。因而,关于一些工序较少、本钱低,要求快速换刀一起也能批量出产的中小型工件数控复合加工场合,需求添加数控机床的主轴并可依据需求自在装备,满意多工件或多工序加工要求,因而需有相应的数控体系给予支撑。多主轴机床首要针对中小型零件大批量出产需求,工序恰当涣散,添加一起加工的主轴数量,工件在机床上只要一次装夹定位,既减少了加工辅佐时刻,进步加工功率,又进步了工件的加工精度。
国内外研制情况
多主轴机床本身诞生较早,开端呈现的首要是多主轴车床,其时被美国等国家列为国家的战备物资,首要用于军工出产,多主轴数控铣削机床则呈现得较晚。德国的SW公司在20世纪90年代推出了国际上第1台多主轴双工作台卧式加工中心,用于高质量零件的大批量高效出产。该机床规划突破了传统的 “床身—立柱”式计划,发明晰一种“立体结构式箱形床身结构”[2]。该床身的特色是由梁柱构成一个封闭式的立体结构,并与传统意义上的“床身”连为一体,构成了一个结构紧凑、高刚性的箱形结构。正是这些结构上的特色,构成了完结其工艺优越性的根底。德国DMG、INDEX和瑞士TORNOS以及日本的一些公司也相应出产了多种类型的数控多轴机床并装备各自专用的数控体系,并且多轴不只仅局限于切削加工,而是切削加工与激光加工或超声加工相复合。德国DMG 公司几年前就在高速数控铣床的根底上添加了一个激光加工头,推出了铣削与激光复合加工的机床DMU60L。该机装有 1 个功率 为 100W 的脉动式 YAG 激光器,光 束 φ 0.1mm、加工功率 20mm3/ min。工件在这种机床上一次装夹后,先用高速铣头完结绝大部分工作量,再用激光头以层切办法进行精加工,去掉型面的铣削痕迹和加工出精密部分,包括雕琢斑纹和图画。国内方面,沈阳立异数控设备有限公司于2004年开端研制国内第1台六主轴数控车床CK2120X6多主轴数控车床,但数控体系选用的是德国Rexroth公司的MTX数控体系[3]。秦川机床集团公司2008年开宣布VTM260型龙门式铣车复合加工中心,机床具有七轴五联动功用,复合化程度较高。西安飞机工业有限责任公司也成功使用多主轴数控机床一次加工出多个较杂乱的飞机肋类结构零件[4]。近年来,各出产厂家也推出各种小型的多主轴数控铣床,但根本只能完结小批量一起多个工件的加工,难以做到快速换主轴的多工序加工,其原因首要受制于数控体系,现在多主轴数控体系大部分还依赖于进口。关于多主轴的多工件、多工序加工数控铣削体系,要求其出产功率能够与一些高产能专用机床乃至数控加工中心比较,一起要具有一般专用机床所没有的高柔性。为此,本文将提出一种可自在装备多主轴的多工件多工序加工数控铣削体系。
多主轴数控铣床的结构办法
敞开化是现在数控体系的发展趋势,PC-NC(个人核算机数控)是现在比较实践的数控体系敞开化的途径。因而,本数控体系规划为依据PC+运动操控卡的办法。运动操控卡置于核算机PCI插槽中,操控卡与数控铣床进行电衔接,经过核算机上的操控软件对多主轴数控铣床进行硬件装备与操控。操控卡测控信号包括三运动轴脉冲及方向信号、各主轴旋转的开关信号、主轴转速信号、各主轴的旋转驱动使能信号、各主轴的换刀气缸升降使能信号、各轴零位限位信号、对刀信号以及手轮输入信号等。 Y 轴驱动电机驱动工件装夹底板做Y 轴方向的运动。整个主轴体系装置在主轴横梁上,主轴横梁由一路伺服驱动电机驱动做 X 向 正负运动, Z 1、 Z 2、 Z 3 等多个主轴装置于主轴横梁上。此体系有必要一起满意中小型多工件加工和多工序铣削加工的需求,因而,多工件加工和多工序加工需求选用不同的机床结构办法,两者差异首要在于轴的驱动办法。
(1)多工件加工机床。
此种装备用于批量加工的同步驱动办法,主轴横梁本身不能在Z 向上下运动,每个主轴各由1路Z 轴驱动电机经过丝杠螺母副办法进行上下驱动,如图1所示。加工时需经过模仿开关调整,使3主轴电机一起或挑选部分进行驱动,对同一个工件而言,3主轴运动操控完全共同,然后能够完结1路驱动信号一起驱动3个轴运动的作用。但因初始装置方位无法确保肯定共同,以及刀具长短因类型或磨损原因而不同,3轴刀具加工点的Z 轴方位一般很难坚持共同。为了使一起加工的工件外形尺寸完全共同,需求顺次调整3个主轴使各轴工件坐标相同,即确保各主轴刀尖处于同一个水平面上,才干确保加工深度共同,然后也能确保加工的工件外形尺寸的完全共同。
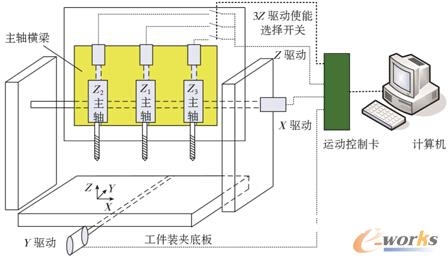

图1 多工件加工机床结构
(2)多工序加工机床。
此种装备用于多工序的轮动驱动装备办法,整个主轴横梁可在Z 方向上下移动,只需一个Z 轴驱动模块。理论上前述批量加工的同步驱动办法也可完结轮动驱动办法,但为抵达快速换刀的意图,机床特意规划成经过气缸升降只挑选其间一个主轴进行加工,如图2所示。关于同一工件不同工序,机床加工代码往往是以同一套工件坐标系为编程基准,每次换刀后,有必要确保刀具加工点处于同一个方位,也便是切换后的刀具在其本身工件坐标系中坐标值不变,这样才干在同一工件上完结不同工序的加工。轮动驱动换刀时只需移动后续工序刀具到前序刀具加工点,省掉惯例的换刀夹持操作,经过以高速替换主轴来抵达快速换刀的作用,节约换刀时刻,换刀结构简略。
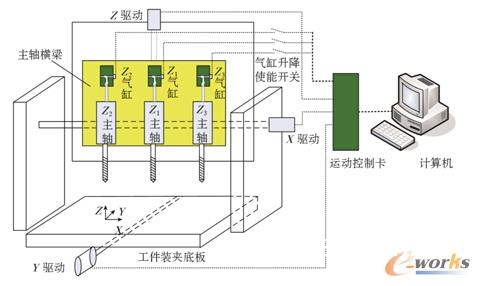
图2 多工序加工机床结构
因机床只挑选其间一种装备办法,多工件多工序加工机床中各主轴的运动驱动使能信号和多工序加工机床中各主轴的换刀气缸升降使能信号在数控体系的运动操控卡上能够共用。多主轴数控体系有必要依据相应的机床装备办法,来完结不同主轴的Z 轴的驱动办法。在多工件同步加工办法下,只要对刀时才独自驱动各个轴,以完结刀尖找平的意图,正常加工时一起驱动各轴。在多工序轮动加工办法下,无论是对刀仍是正常的加工,某时刻只要一个主轴下压到位,待一个工序加工结束,直接切换主轴进入下一工序加工。
可装备的多主轴数控体系要害技能
关于可装备的多主轴数控铣削数控体系,除了具有根本的直线和圆弧等插补、速度滑润、图形显现、PLC逻辑操控等功用外,为完结2种办法的加工,该体系的主轴办法有必要可自在装备,用户可依据所选机床办法进行相应的数控操作。关于多工件同步加工办法,要害点是调整各轴刀尖切削点使其高度共同;关于多工序轮动加工办法,要害点则是怎么完结多主轴的主动对刀以及多气缸快速替换主轴操作。关于大型的龙门式铣床,还有轴双驱动同步操控要求。
1 多工件同步加工办法下刀尖齐平校准
因初始装置方位高度的不共同以及刀具长短各不相同,多轴刀具加工点的Z 轴方位一般很难坚持在同一高度。为使一起加工的工件外形尺寸完全共同,需求顺次调整各个主轴使各轴工件坐标相同,即确保各主轴刀尖在同一个水平面上,才干确保加工深度的共同,也就能确保加工的工件外形尺寸的完全共同。下面以3主轴数控雕铣机床为例来阐明刀尖齐平校准操作的办法,设3主轴别离为Z1、Z2、Z3。
(1)别离对3个主轴进行机械回零操作,机械坐标主动置零。
(2)在工件装夹台面挑选一个水平基准面,先以Z1为基准轴,在Z1刀具正下方放置一个固定对刀仪。体系经过挑选开关只挑选Z1轴进行驱动,低速下降,当刀尖碰到对刀仪时触发对刀到位信号,当即记载此刻的Z1对应的对刀机械坐标值1,然后Z1轴回退至安全高度;
(3)将Z2刀具移至对刀仪正上方,然后体系经过模仿开关只挑选Z2轴进行驱动,低速下降,当刀尖碰到对刀仪时触发对刀到位信号,当即记载此刻的Z2对应的对刀机械坐标值j2,Z2轴回退至安全高度。再以上述办法再确认Z2对应的对刀机械坐标值j3。
(4)依据3主轴对应的对刀机械坐标值,即可得到各轴在Z 轴方向的差错,此差错将作为批量加工时确保同一加工平面的调整依据。
(5)加工前经过开关信号挑选别离驱动3主轴,使3主轴回到机械原点。
(6)取出3主轴中Z1对应的对刀机械坐标值j1、Z2对应的对刀机械坐标值j2和Z3对应的对刀机械坐标值j3,判别出3个值中最大的值,因对刀点都在Z 零点以下,因而j1、j2、j3均小于0,3个值中最大的值实践便是肯定值为最小的值,以此值对应的轴为基准,然后以前述丈量的各刀具的高度差错值进行刀具长度补偿,终究使各轴刀尖处于同一水平面。
经过加工工件前各轴水平高度调整,在加工前就已使各主轴刀具刀尖处于同一高度,能够依据需求一起挑选驱动悉数轴或许其间某些轴,使多个主轴同步加工。因工件原点是以Z1的对刀成果为基准的,所以无论是加工前调整各轴高度仍是加工期间,加工轨道Z 方向均只核算Z1运动坐标。
2 多工序轮动加工办法下多主轴主动对刀
在进行多工序轮动加工前,有必要事前进行各主轴的对刀,对刀的本质是为获取各主轴刀具的补偿值,以便在加工中换主轴时能够坚持工件坐标的共同性。多主轴主动对刀过程如下。
(1)体系以Z1为基准主轴,手艺或选用寻边器主动丈量其它主轴在X、Y 方向上相对基准主轴Z1的偏置间隔,并记载到数控体系中,作为换刀时X 和Y 向的偏移间隔依据。
(2)对整个主轴横梁进行机械回零驱动操作,机械坐标主动置零;
(3)在工件装夹台面上挑选一个水平基准面,以Z1为基准轴,使能Z1气缸使Z1刀具下压到位,在Z1刀具正下方放置一个固定对刀仪;
(4)体系只挑选Z 轴进行驱动,低速下降,当刀尖碰到对刀仪时触发对刀到位信号,体系当即记载并保存此刻的Z1对应X 、Y 机械坐标值和Z向对刀机械坐标值j1,j1作为Z1轴的工件原点Z 值,然后Z1轴回退至一固定点;
(5)切换Z2刀具:依据事前设置的Z2相对Z1在X 、Y 向上的偏置间隔,移动整个主轴,意图是使Z2刀尖对准本来Z1刀尖地点的X 、Y 方位,此刻Z2刀尖也正对下方的固定对刀仪。体系只挑选Z2轴进行驱动,低速下降,当刀尖碰到对刀仪时触发对刀到位信号,体系当即记载并保存此刻的Z2对应的对刀机械坐标值j2,此机械坐标值作为Z2轴的工件原点Z 值,Z2的工件原点X、Y 值是依据Z1轴的工件原点X、Y 值以及Z2相对Z1在X、Y 向上的偏置间隔主动核算获取,然后驱动Z2轴回退至固定点。
(6)以相同办法切换到Z3等其它轴,体系记载并保存对应的对刀机械坐标值j3,并核算Z3轴的工件原点X、Y 值,然后Z2轴回退至固定安全点。
(7)经过以上过程,体系记载了各主轴的工件原点坐标值,后续轮动加工时,每个刀具将以各自的工件原点为基准进行加工,以确保各主轴刀具实践加工点处于同一个工件坐标体系。
3 多工序轮动加工办法下多气缸主动快速替换主轴
数控体系辨认当时加工代码所标明的刀具,体系切换到相应刀具,比方代码中T0 ~T2别离代表主轴刀具Z1~Z3。依据当时刀具号和所需切换的刀具号,需驱动相应的汽缸和Z向伺服电机,完结切换主轴动作。主轴切换过程如下。
(1)记载当时刀具的工件坐标值,然后回退至固定安全点,封闭该刀具气缸使刀具回缩到位。
(2)使能需切换的刀具的换刀气缸使对应刀具下压到位,依据事前设置的当时刀具以及需切换的刀具相对Z1在X、Y 向的偏置间隔,核算换刀偏置移动间隔,移动整个主轴支架,意图是使需切换的刀具刀尖对准本来刀具刀尖地点的X、Y 方位。
(3)取新的工件坐标系,依据记载的换刀前刀具在其工件坐标体系中Z 向的工件坐标值,核算新的刀具需移动的间隔,终究使切换后的刀具抵达换刀前的刀尖点,工件坐标值Z 向坚持共同。
(4)依照新的工件坐标系进行加工。因加工代码一般是以同一工件坐标系进行编程规划,因而,关于同一主轴横梁上的刀具进行换刀后,实践加工工件坐标将坚持共同,然后完结同一工件的不同工序加工。
(5)为了抵达快速替换主轴意图,在需求替换主轴时,需替换的主轴刀具能够先行旋转发动,待主轴替换结束,已替换的主轴刀具的转速已满意加工要求,能够当即加工,大大节约了换刀时刻。
(6)加工时刀具切换后,工件坐标原点的替换使得实践的机械坐标发生偏移,假如以机械坐标作为加工轨道显现,不同工序发生的图形将发生偏置。而工件上实践的加工点是以同一工件坐标系为基准的,因而显现轨道时,假如对错基准轴的轨道,需求在XYZ 三维图形上加一个反向的与工件原点相对应的偏置值,使不同工序的加工轨道以基准轴的工件坐标加以显现,即与实践加工的工件图形坚持共同。
4 Y 轴双驱同步纠偏技能
关于大型多主轴数控体系,Y 轴往往装备成双驱同步办法。在满意工作台和工件动、静态刚度的情况下,龙门柱沿导轨纵向进给,然后能够获得高的加速度特性。因为横梁及其相匹配的主轴部件并不总是构成对称结构与对称受力,虽然龙门柱两头选用完全相同的传动组织,但终究仍是不能确保龙门结构移动的同步性。这种不同步性发生的机械耦合可能使龙门结构或驱动元件遭到损坏,机床发生激烈振荡[7-8]。因而,Y 轴双驱同步进给技能至今没有很好处理。
本体系选用一种自适应操控办法,关于双Y 各自设置独立的操控体系,体系选用主从工作办法。当体系受不平衡负载或扰动影响,其参数或功能发生了较大的改变。经过检测主动轴状况和从动轴状况之间的差错,经过自适应规则发生的反馈作用来修正主动轴和从动轴操控器的参数,发生的辅佐操控量输入到各自自适应操控体系中,一起别离调整2个操控器,使二者在速度上坚持共同。2个操控器本身不但能按捺扰动,还具有彼此和谐的才能。
可装备的多主轴数控体系加工验证
(1)多工件同步加工。
一次装夹,使用多主轴能够加工多个零件。图3所示为选用多主轴加工机床,数控体系装备为多工件同步加工办法,资料为铝合金,选用R3球头铣刀,一次一起加工3个手机零件。经加工验证,加工出的3个零件外形尺寸共同,抵达精度要求。关于加工功率,相同加工参数条件下,因只需一次装夹预备以及空移机床等操作时刻,实践加工功率将进步3倍以上。考虑到机床变形以及负载力的增大,这种机床主轴不能无限增多,一般一台机床最多3~10个主轴。
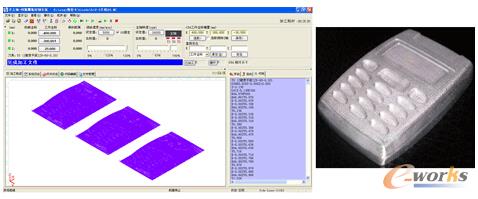
图3 多工件同步加工验证
(2)多工序轮动加工。
如图4所示,选用多工序三气缸换主轴机床,数控体系装备为多工序轮动加工办法,资料为铝合金,选用R3球头铣刀,一次装夹,一起完结工件的毛坯开粗、精加工、钻孔工序。经过气缸驱动替换主轴,一道工序结束转换到另一工序,完结整个零件的加工。一般的刀库换刀办法有必要在刀具中止旋转的根底上换刀,换刀时刻大部分花在等候前一工序刀具中止和后一工序刀具发动上,形成整体加工功率下降。而替换主轴的办法能够在需求替换主轴时,后一工序刀具能够先行发动,待主轴替换结束,已替换的主轴刀具的转速一般已满意加工要求,能够当即加工,大大节约了换刀时刻。
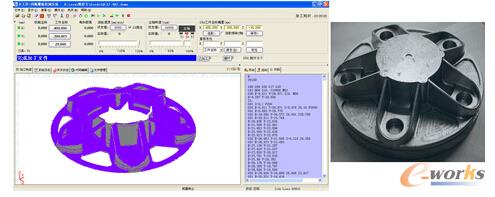
图4 多工序轮动加工验证
结束语
本文提出的一种可自在装备的多主轴数控体系,可依据实践多主轴机床主轴装备办法的加工需求,进行多主轴的驱动操控,完结多工件同步加工或多工序轮动加工2种驱动办法的自在装备。在多工件同步驱动装备办法下,为了使一起加工的工件外形尺寸完全共同,能够在加工前顺次调整3个轴,确保各主轴刀尖在同一个水平面上,然后确保加工的多个工件外形尺寸的完全共同。在多工序轮动驱动装备办法下,因换工序换刀后,能够确保刀具加工点处于同一个方位,这样能在同一工件上完结不同工序的加工。轮动驱动换刀时只需移动后续工序刀具到前序刀具加工点,省掉惯例的换刀夹持操作,一起又消除了主轴电机中止和发动等候时刻,大大节约了换刀时刻。该数控体系不只仅可运用于多主轴铣削操控,也可为激光加工、超声加工等复合加工预留了扩展通道。加工成果验证标明该数控体系能自在装备多工件和多工序2种加工办法,柔性较高,在大批量工件加工和工序较少的多工序加工场合,具有较大的实践运用价值。






