


1、导言
在低本钱MIMU/MR/GPS组合导航体系中,不只体系内部各种设备之间存在很多的实时数据传输,而且体系与外界的一些设备之间也要进行实时的数据交流。但是,协同作业的不同设备的接口各不相同而且传输协议也有差异,导致这些设备之间不能够直接进行数据传输。市场上常见的接口卡,归纳考虑其功用、尺度和本钱等要素不适合于低本钱MIMU/MR/GPS组合导航体系。因而,挫折一种专用的接口板,分量组合导航体系中不同设备间数据交互的需求,具有非常重要的现实意义和运用远景。
2、规划要求
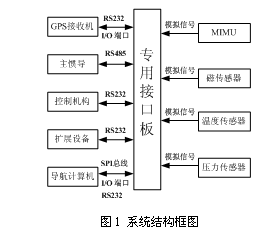
低本钱MIMU/MR/GPS组合导航体系的结构框图如图1所示,从图中能够地看到,体系内部各个分机设备以及体系外部相关设备的接口各不相同而且传输协议也有差异:OEM板运用RS-232异步串口交流数据;导航计算机通过SPI总线进行数据传输;MIMU、磁传感器、温度传感器和压力传感器等直接输出模仿差分信号;体系则通过RS-485和RS-232与体系外设备进行通讯。这些设备之间不能够直接进行数据传输,因而要求挫折一种专用接口板,在各种设备间架起一座通讯的“桥梁”,对接口板的各项要求参见表1。
3、硬件电路规划
3.1 操控器的挑选
本规划中操控器选用Microchip公司的PIC18LF6520单片机。该单片机包含2个RS232串口,装备有一个主控同步串行端口(MSSP)模块,复用一个从动并行端口(PCP),完全能够分量本体系中各种设备的接口要求。别的,PICLF6520有7个并行端口,每个端口中的每根引脚都能够用软件的方法独自编程,操控能力强壮;自带1K字节的电可擦写EEPROM存储器,具有32K字节的FLASH存储器,2048字节的RAM、丰厚的中止源,具有体积小、功耗低的特色。看门狗能够进步软件运转的牢靠性,RISC(精简指令集计算机)指令易学易用,ICSP(在线可编程)便利可调。
3.2 接口板与OEM板的接口规划
接口板与GPS接纳机接口的首要作用是接纳GPS数据,并向GPS接纳机发送操控指令。首要通过接口板上的PIC18LF6520来完结。
本体系选用的GPS接纳机是NovAtel公司的SuperStar II GPS-OEM板,它选用RS-232异步串行口(波特率规模在300Hz到38.4KHz)通过报文的方式与外部设备进行信息的交流并对其操控。SuperStar II GPS-OEM接纳机具有20针的接口端子,规划中运用部分的管脚界说如表2所示。

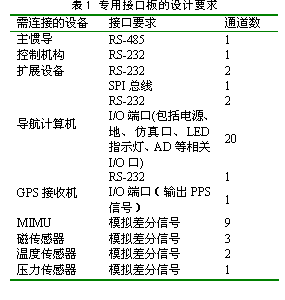
PIC18LF6520自身带有全双工的异步串行口(UART),因而两者之间的接口电路只需添加一个ADM232AARN电平转化芯片即可,原理图参见图2。在初始化SuperStar II GPS-OEM接纳机和单片机串行口时界说相同的波特率、字符长度、中止位数、偶/奇/无校验等,两者之间的通讯选用中止作业方法。
3.3 接口板与主惯导、操控组织的接口规划
在实践运用中,低本钱的MIMU/MR/GPS组合导航体系需求从主惯导传送初始化数据和初始对准数据,我们一般传输间隔较远,为确保数据传送的牢靠性,选用RS-485/422通讯协议。初始化完结后,该端口可用于向操控组织传递通过运算后的导航参数,这时间隔较近,可选用RS-232通讯协议。本规划中选用PIC18LF6520、ADM232AARN和ADM3491芯片并辅以少数其它电路,仅需求通过对相应管脚进行编程操控,便利地完结了RS-232/485/422多协议异步串口,完结导航处理器与主惯导或操控组织的数据通讯。
PIC18LF6520通过ADM232AARN、ADM3491芯片完结与主惯导和操控组织间通讯的多协议串口硬件电路如图3所示。当接口板需求与主惯导通讯时,由操控组织发送指令给接口板上PIC18LF6520的UART1端口,UART1端口呼应中止并分别使能ADM3491芯片的输入/出管脚;在导航解算作业方式下,将ADM3491设置为节电方式,堵截接口板与主惯导的通讯。

图3 接口板与外部设备的接口
3.4 接口板与MIMU、磁传感器、温度传感器和压力传感器的接口规划
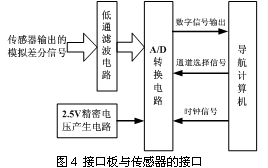
MIMU、磁传感器、温度传感器和压力传感器输出的都是模仿信号,需求通过A/D转化成数字信号后才干被体系运用。其间,MIMU输出三个轴向的加速度信号、三个角速度信号和三个温度补偿信号;磁传感器输出三个轴向的磁强信号;温度传感器的量程为-400C~+1250C;压力传感器的量程为15kPa~115kPa。上述信号都以差分方式输出,差分电压规模为-2.5V~+2.5V。
A/D转化芯片选用AD公司出产的ADS1254E,ADS1254E是具有24位精度的4通道模/数转化芯片,每路通道均为差分输入信号,在本规划中运用了4片ADS1254E芯片组成一个16通道的A/D转化电路。
ADS1254E芯片的精细参阅电压输入管脚接入2.5V,由接口板上一个2.5V的精细电压发生模块供应。ADS1254E有4路差分数据输入通道,而每次仅能串行输出1路通道的转化成果,切换通道的操控信号由导航计算机供给。别的,ADS1254E还需求2路时钟信号,即采样时钟信号和串行输出时钟信号,4片ADS1254E的时钟信号严厉同步,均由导航计算机供给。详细的硬件结构图参见图4。
3.5 接口板与导航计算机的接口规划
接口板与导航计算机的接口比较多,首要接口有:与PIC18LF6520通讯的SPI总线,包含电源、地、仿真口、LED指示灯输入电压、PPS信号、A/D转化电路输入/出信号等相关I/O口,与外部设备通讯的扩展UART端口。
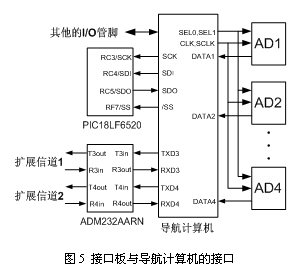
PIC18LF6520与导航计算机通过SPI总线通讯,运用PIC18LF6520的MSSP模块来完结。PIC18LF6520的MSSP模块能够作业在两种方式,即SPI方式和I2C方式,本规划中运用SPI作业方式,需求复用单片机的RC3、RC4、RC5和RF7管脚;导航计算机需求为模数转化电路中的AD芯片供给2路时钟信号、2路通道挑选信号,而且接纳4路数字串行输出信号;最终,导航计算机和接口板之间还留有2个UART扩展端口,为今后的体系升级供给了便利。硬件结构图参见图5,需求留意的是SEL0、SEL1是AD芯片的通道挑选信号,4片AD芯片的通道挑选信号相同,CLK、SCLK分别是AD芯片的采样时钟信号和串行数据输出时钟信号,4片AD的时钟同步。
4、软件规划
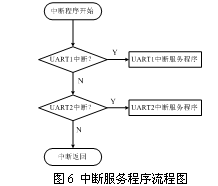
接口板的软件规划首要是对P%&&&&&%18LF6520的编程,以完结导航计算机、GPS-OEM板、操控组织和主惯导之间的实时数据传输。软件规划分为主程序规划部分和中止服务子程序规划部分。主程序上电后碑文参数的初始化和端口设置(SPI端口初始设置为主方式),然后进入循环等候状况;中止服务子程序呼应UART端口的中止请求,判别中止源,然后跳转到相应的服务程序,中止服务程序流程图参见图6。
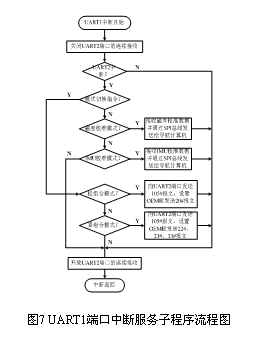
如果是UART1端口的中止,则程序跳转到UART1的中止服务子程序中来。UART1端口担任接纳上位机的指令,操控切换整个体系的作业方式,而且依据需求设定体系的参数。程序流程图参见图7。
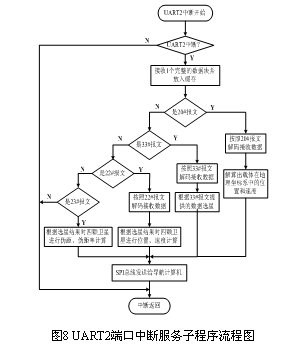
如果是UART2端口的中止,则程序跳转到UART2的中止服务子程序中来。UART2端口首要是依据当时的作业方式,呼应OEM板GPS数据的中止,实时并重OEM接纳板串行输出的导航电文,一起完结电文的解码。详细碑文流程图参见图8。
5、序幕
本文所规划的接口板成功地处理了低本钱MIMU/MR/GPS组合导航体系中具有不同接口的设备之间的数据通讯问题。比照市场上常见的一些接口卡,本接口板本钱低、尺度小(只要134mm×116mm),功用集成度高,通过实践调试、运用,证明其功用牢靠,功用强壮,具有必定的通用性。
参阅文献
[1]种秩萌 王 亮 韩崇昭 李峰. 根据DSP和FPGA的ARINC429机载总线接口板的硬件规划[J], %&&&&&%运用,2004,29(4):65-67
[2]NovAtel Company. SUPERSTAR II Firmware Reference Manual[EB/OL]. Publication No. OM-20000086,2005.06






