


一、导言
卫星测控多波束体系首要针对卫星信号施行测控,它包含两个方面:信号波达方向(DOA)的估量和数字波束组成。波达方向的估量是对空间信号的方向散布进行超分辩估量,提取空间源信号的参数如方位角、仰角等。数字波束组成也称为空域滤波,首要是依据信号环境的改动自适应地改动各阵元的加权因子,在希望信号方向构成主波束,在搅扰信号方向构成零陷,下降副瓣电平, 意图是在增强希望信号的一同最大程度的按捺无用的搅扰和噪声,并提取有用的信号特征以及信号所包含的信息。用于测向和波束组成的算法许多,挑选适宜的算法来满意体系的需求是一个重要方面。另一方面,该体系对实时性有必定的要求,要求在限制时刻内完结测向和波束组成权值的核算。
本文所介绍的卫星测控多波束体系选用ADI公司新近推出的新一代TigerSHARC DSP芯片和FPGA器材相结合组成信号处理模块,运用DSP的软件编程完结测向和波束组成权值的核算,然后用FPGA器材将原始信号和权值进行波束组成,在体系规划中咱们运用两片igerSHARCDSP
芯片来完结。高功用的DSP芯片确保了数据可以精确及时的处理,也构成了该体系的重要组成部分。
二、TigerSHARC DSP芯片介绍
TigerSHARC101S 是AD公司新近推出的高功用定/浮点DSP,具有极高的处理才能,它选用静态超标量结构,既有超标量处理器所具有的大容量指令缓冲池和指令跳转功用,又可以在程序履行前就把指令级并行操效果编译器猜测出来,其首要的功用指标为:
(1)主频为250 MHz,即单指令周期为4 ns;有2个对等的处理单元来支撑SIMD(单指令多数据)形式;
(2)体系内部有3条独立的128位数据总线,别离拜访各自的2 Mbit存储空间;
(3)体系外部数据总线为64 bit,地址总线32 bit,外部寻址空间为4G字;
(4)4个8 bit的全双工链路口,各自可以独立作业。在多处理器体系中,链路口可作为处理器之间的点到点通讯,组成散布式的多处理器体系。14个DMA通道,可用于后台传输;
(5)可扩展性强,同享并行总线可支撑8个TS101S连在一同用于高速的数字信号处理。
因为测向和波束组成的算法核算量大,体系对信号的处理时刻有要求,一片DSP不能完结使命,本体系充分运用TS101S DSP芯片的并行处理才能,选用多处理器的并行结构来完结信号的处理。
三、算法研讨
用于测向和波束组成的算法许多,各种算法各有优势,通过对这些算法的模仿和功用比较,终究挑选MUSIC(Multiple Signal Characteristic)算法来完结测向,用依据线性束缚最小二乘恒模算法进行波束组成。MUSIC算法的基本原理是依据天线阵中不同方位的阵元所接纳到的空间来波信号的样本数据、天线方位参数和阵元的特性参数,运用现代谱估量理论和统计学理论及相应的数学运算,对来波的空间谱进行估量,并剖析其能量的散布状况,以确认空间来波的方向,也便是从背景噪声中检测出空间源信号并估量出信号的参数如方位角、仰角等,这种测向技能具有在较强搅扰环境下一同对同信道内多个信号的快速、高灵敏度、高精度测向的功用。算法完结流程图1所示。

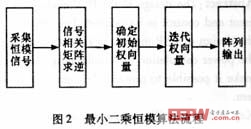
依据线性束缚的最小二乘恒模算法是最小二乘算法的一种改善,它克服了最小二乘算法存在的搅扰捕获问题,运用线性束缚的办法对初始权向量进行优化,使之在迭代过程中可以较快而精确地收敛于咱们所希望的信号,而且不受信号功率巨细的影响。该算法收敛速度快,输出信号的信干噪比可以挨近抱负值,而且对幅相差不灵敏,通过对阵列信号进行算法仿真,最小二乘恒模算法功用可以到达体系需求。算法的流程如图2所示。
四、DSP模块规划
1.DSP模块功用
体系运用一个C尺度VXI规范机箱,插槽包含0槽、DSP模块和波束组成模块。DSP模块担任测向和波束组成权值的核算,波束组成模块将原始数据和权值进行波束组成,模块之间的数据交流运用LBUS。操控终端(微机)通过VXI总线给DSP模块发送指令,DSP模块以外部中止2的方法呼应接纳指令并完结操控中止的对体系的操控,指令格局由内部协议规则。
依据体系需求,DSP模块要完结以下6个功用:
(1) 接纳原始数据和组成成果
数据收集部分是由波束组成模块完结的,DSP模块定时器每500 ms接纳一次原始数据和成果数据,并在500 ms内完结测向和波束组成权值的核算。数据交流依照两个模块拟定的内部协议来履行。
(2)主动盯梢
体系初始或一般状况为主动盯梢状况,来波的初始方位区域已给定,DSP模块每500 ms测向一次然后确保了体系可以紧跟信号来向。
(3)屡次测向
考虑到实践信号中存在的搅扰和差错,取屡次测向中的均匀值来作为实测方向。
(4)指定来波方向
指定来波方向后直接核算波束组成的权值,此刻不运用接纳的原始信号而是自己发生信号来进行波束组成权值的核算。
(5)显现通道波形或幅相差
DSP板将幅相差的数据回传给操控终端后并在终端核算机上显现。
(6)显现组成成果
DSP模块将波束组成的权值传输给波束组成模块,波束组成模块将权值和原始数据组成后回传过来并在操控终端上显现。
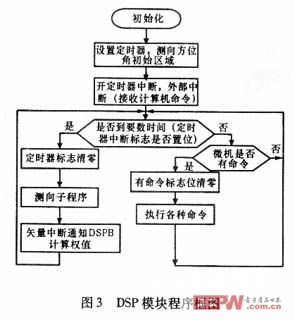
DSP模块程序框图如图3所示。
2.DSP模块结构
接纳卫星信号的阵列天线为6×6的面阵,多通道接纳机完结信号的采样,再通过数字下变频,送到处理单元的是36个通道的I、Q两路共72路数据。因为阵列信号的数据量大,算法也比较复杂,咱们需求运用2片TS101S芯片并行处理来完结。
并行体系的互连结构包含2种方法:同享存储器结构和散布式结构。同享存储器结构的衔接方法是将一切的处理器都连到一个通道上,该通道一般是一种背板总线(如VXI总线),它既可以作为处理器间的通讯前言也可以作为处理器和同享存储器间的数据通讯。这种结构数据传输的带宽远远大于直接衔接的通讯端口,可是存在着总线竞赛问题,跟着处理器数意图添加,处理器均匀的总线带宽会下降,影响数据吞吐量。散布式结构处理器之间通过链路口进行直接的数据传输,链路口在处理器之间供给了高宽带的点对点通讯。这种衔接彻底为了处理器之间的通讯,可是在数据传输时会占用其他DSP芯片的内部资源。
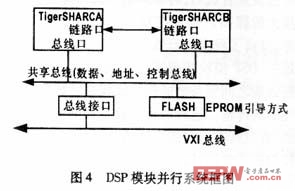
TigerSHARC DSP芯片硬件上可以一同支撑这两种并行体系结构,前者通过同享外部地址数据操控总线方法完结,后者通过DSP间的专用的链路口点对点的互连完结。本文所规划的DSP模块结构从通讯网络的衔接联系来看,既是同享总线体系,又是散布式体系,两片DSP芯片的外部地址总线、数据总线、操控总线直接相连,而且一同通过总线接口衔接到VXI总线上,完结和其他模块的数据通讯。因为每片DSP内部有6 Mbit的双口RAM,因而不需求外部数据存储器。DSP A和DSP B的链路口也直接相连,两片DSP可以通过链路口交流数据。DSP模块程序选用EPROM方法引导,两片DSP共用一片548K×8bit的FLASH DSM2150作为程序存储器。DSP模块框图如图4所示。
整个DSP模块的处理时刻分为3个时刻段,别离为从缓冲中读取数据时刻、测向时刻和波束组成权值核算时刻,其间首要的开支是测向的时刻。为了使DSP模块具有更高的功率,有必要依据该模块的结构和Tiger DSP芯片的功用合理分配使命。因为首要的开支是测向算法,所以处理好测向的并行算法是特别重要的。在MUS%&&&&&%算法中,判别出信号个数后要别离对各个信号区域进行峰值查找,最终确定信号来向,体系最多可测4个不同来向的信号,因而将峰值查找的区域区分后交给两片DSP一同进行查找,可以节省很多的时刻。测向和波束组成权值的核算不能一同进行,DSP A告诉 DSP B进行波束组成后又可以返回去从缓存区中读取数据,此刻DSP B核算波束组成的权值,这样又大大进步了并行度。操控终端对DSP模块的指令是通过外部中止读入,在履行操控终端的指令时将定时器时钟封闭。
DSP模块的程序结构用C言语来构建,在C中刺进汇编来进步运算功率,并充分运用TigerDSP芯片双处理器核的SIMD结构,为了更好地对整个的程序进行优化,运用开发软件中的东西Linear profiling 剖析各个子函数所占用的时刻份额,然后优化程序的瓶颈。并行的体系规划和一些优化办法使DSP模块的运转时刻可以满意体系规划的需求。
3.DSP模块规划的特色
在卫星测控多波束体系DSP模块的规划中咱们考虑了多方面的要素,可以概括为以下几个特色:
首要,高功用TigerSHARC DSP并行结构确保了体系的功用,体系要求在500 ms内完结最多4个来波方向的测定和波束组成,运用两片Tiger SHARC DSP并行作业,在300 ms内就可以完结,使得体系有富余的时刻去呼应操控终端的指令。
其次,功用优越的测向和波束组成算法确保了体系的安稳作业,测向的精度确保在0.5°范围内,信号通过波束组成后,将噪声信号加以按捺,信噪比有了很大的进步。而且在双DSP处理器中并行分配使命,进步了程序运转功率。
第三,DSP模块和波束组成模块之间以及和外部操控终端之间齐备的通讯协议确保了数据和指令能构精确的传输。这种通讯协议是依据实践需求自定义的,而且具有必定的容错功用,确保了各个模块之间接口的正常运转。
最终,体系操控流程规划合理,咱们运用了DSP的外部中止1、2、定时器中止,以及两片DSP之间通讯的矢量中止来完结对体系的操控,为了使高速运转的DSP可以有用的与其他模块、外部操控终端进行通讯,程序流程的规划通过了细心的琢磨,为DSP的安稳作业供给保证。
五、结束语
本文评论了卫星测控多波束体系DSP模块中算法的并行完结以及并行处理使命的分配,采取了一系列办法优化DSP模块的全体程序,并运用了模块化的思维,结构规划合理,可以满意体系的需求。






