现在视觉计划做ADAS既有双目也有单目,两者在间隔检测上用了不同的技能路途,产品化时也存在各自优缺陷,对此作者谈了谈自己的观点。本文作者姜安,为中科慧眼CTO。

ADAS功用的第一步是感知,也便是调查车辆周边担任的路况环境。在这个基础上才干做出相应的途径规划和驾驭行为决议计划。现在感知所选用的传感器包括各种形式的雷达、单目摄像头、双目摄像头号,或是由这些传感器进行不同组合构成的感知体系,而这些传感器材各有利弊,传感器交融是大势所趋。
在这其间,摄像头不可或缺,能够经过收集前方路途图画,完成车道线障碍物以及行人检测ADAS功用。关于ADAS摄像头选用有哪些考究?单双目计划存在哪些差异?在此谈一谈我的观点。
ADAS摄像头成像哪些要求?
依据ADAS检测需求,摄像头在挑选时需求具有下面2个特色:
一是要看得满足远。看的越远就能有愈加富余的时刻做出判别和反响,然后防止或许下降事端产生形成的丢失。这类摄像头重视的参数是焦距,焦距越长看的会越远。可是焦距越长,带来的问题是视角越窄,所以需求折衷考虑。
二是要求高动态。选用具有高动态规模的是非相机,能够有用按捺光晕现象,并增强暗处的细节,然后进步成像质量。别的,五颜六色图画在镜头外表进行了镀膜,尽管提升了人眼的感知体会,但实践上下降了信噪比或许说信息量。这对后续的图画处理晦气。
依据这些要求,很简略发现现在职业里的一种炒作现象。许多车上运用的智能硬件多是行车记载仪、云镜等产品,会在本来成像体系的基础上添加ADAS功用,其实仅仅厂家赚取噱头的办法。
由于行车记载仪的意图是记载车辆周边的情况,看的越明晰越好、越全面越好,即“人友爱”。这就需求成像体系具有超高的分辨率、超好的色彩还原性、超大的广角镜头,视角增大意味着焦距的缩小。这与ADAS对成像体系的要求截然相反,ADAS要求的图画质量是“机器友爱”,因此在行车记载仪的成像体系基础上开发ADAS功用是不切实践的。现在许多声称有ADAS功用的行车记载仪,一般都只要车道线检测这一个功用。有的尽管有别的如磕碰预警的功用,可是用户体会极差。
单/双意图测距原理差异
现在摄像头ADAS有单目和双目两种计划,两者的一起特色,便是经过摄像头收集图画数据,然后从图画数据上得到间隔信息。ADAS一个很重要的作用是磕碰预警。磕碰预警需求重视间隔的改变,需求估量行将磕碰的时刻。有了间隔丈量,才会有间隔改变,有间隔改变才会有磕碰时刻的估量,最终才会有预警。
单目摄像头的大致测距原理,是先经过图画匹配进行方针辨认(各种车型、行人、物体等),再经过方针在图画中的巨细去预算方针间隔。这就要求在预算间隔之前首要对方针进行精确辨认,是轿车仍是行人,是卡车、SUV仍是小轿车。精确辨认是精确预算间隔的第一步。
要做到这一点,就需求树立并不断保护一个巨大的样本特征数据库,确保这个数据库包括待辨认方针的悉数特征数据。比方在一些特别区域,为了专门检测大型动物,有必要先行树立大型动物的数据库;而关于别的某些区域存在一些十分规车型,也要先将这些车型的特征数据加入到数据库中。
假如缺少待辨认方针的特征数据,就会导致体系无法对这些车型、物体、障碍物进行辨认,然后也就无法精确预算这些方针的间隔。导致ADAS体系的漏报。
而双目检测的办法便是经过对两幅图画视差的核算,直接对前方景象(图画所拍摄到的规模)进行间隔丈量,而无需判别前方出现的是什么类型的障碍物。所以关于任何类型的障碍物,都能依据间隔信息的改变,进行必要的预警或制动。
双目摄像头的原理与人眼类似。人眼能够感知物体的远近,是由于两只眼睛对同一个物体出现的图画存在差异,也称“视差”。物体间隔越远,视差越小;反之,视差越大。视差的巨细对应着物体与眼睛之间间隔的远近,这也是3D电影能够使人有立体层次感知的原因。
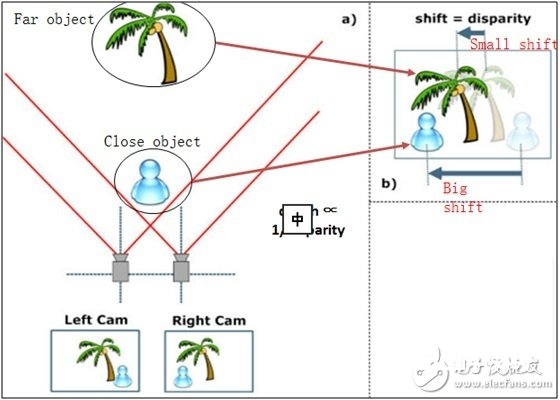
图中的人和椰子树,人在前,椰子树在后,最下方是双目相机中的成像。能够看出右侧相机成像中人在树的左边,左边相机成像中人在树的右侧,这是由于双意图视点不一样。再经过比照两幅图画就能够知道人眼调查树的时分视差小。而调查人时视差大,由于树的间隔远,人的间隔近。这便是双目三角测距的原理。双目体系对方针物体间隔感知是一种肯定的丈量,而非预算。
单/双目计划的优势与难点
单意图优势在于本钱较低,对核算资源的要求不高,体系结构相对简略。其缺陷在于有必要不断更新和保护一个巨大的样本数据库,才干确保体系到达较高的辨认率;无法对非标准障碍物进行判别;间隔并非真实意义上的丈量,精确度较低。
双目体系本钱比单目体系要高,但尚处于可承受规模内,而且与激光雷达等计划比较本钱较低;二是没有辨认率的约束,由于从原理上无需先进行辨认再进行测算,而是对一切障碍物直接进行丈量;三是精度比单目高,直接运用视差核算间隔;四是无需保护样本数据库,由于关于双目没有样本的概念。
双目体系的一个难点在于核算量十分大,对核算单元的功能要求十分高,这使得双目体系的产品化、小型化的难度较大。所以在芯片或FPGA上处理双意图核算问题难度比较大。世界上运用双意图研究机构或厂商,绝大多数是运用服务器来进行图画处理与核算的;也有部分将算法进行简化后,运用FPGA进行处理。现在,中科慧眼在芯片上的核算功率现已到达15fps,在FPGA+ARM架构上的核算功率到达了40fps。
另一个难点在于双意图配准作用。经过双目摄像头的图画配准能够核算生成表明间隔的二维图画。下图是中科慧眼双目计划对实践场景信息收集与核算得到的间隔的对应联系,不同饱和度色彩代表不同间隔,从暖色彩至冷色彩为间隔由近及远。在核算过程中,需求对噪点与空泛做很好的按捺。从右图能够看出,色彩(间隔)是滑润过渡,没有跳变。
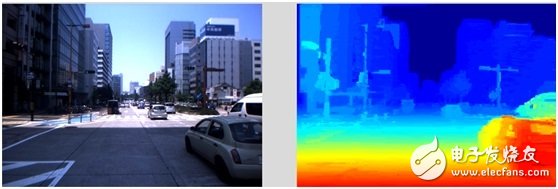
△中科慧眼间隔核算取得的二维图画
一些FPGA计划中有许多噪点与空泛,对后续核算晦气,存在安全危险。关于小障碍物的辨认,既要做到没有杂点和空泛,又要体现细节。不然比方一条横着的栏杆无法辨认,会添加驾驭的危险。下面的图体现的是小物体和行人的勘探上中科慧眼双目计划与世界上其他算法的比照。
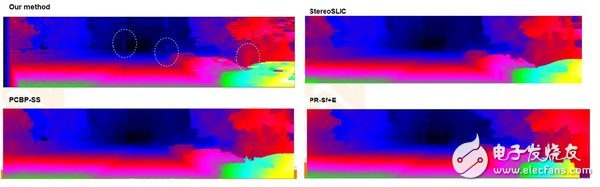
△Our为中科慧眼算法小障碍物的双目配准作用,其它为世界盛行传统办法的处理作用
小结
由于检测原理上的差异,双目摄像头在间隔测算上比较单目有自己的特色,其硬件本钱和核算量级的加倍,是难关也是突破口。就像谷歌自动驾驭轿车不断堆集很多的经历和运用数据,才或许一步步堆集完成自动驾驭。中科慧眼的双目产品现在完成了样机,也正在进行大规模路测。从产品理论技能原型走到真实被用户承受的产品,还有很长的路要走。