导言
当时,长途振荡监测体系在理论研究和使用体系开发等方面已取得了必定开展,但在体系牢靠性、网络安全、长途数据实时收集和传输、信息同享等方面还存在着许多缺乏。特别是处于恶劣和杂乱环境下的大型设备,一方面散布地域广,监测点多;另一方面空间方位有限,常常存在严峻的电磁搅扰。因而,选用既实时、灵敏和高效,又安全牢靠的现场总线数据通讯方法作为设备状况监测体系的数据收集和传输方法十分必要。
CAN现场总线是一种有用支撑散布式操控和实时操控的串行通讯网络总线,开始由德国Bosch公司为轿车监测和操控而规划,后被用于其他工业部门的操控,使用规模广泛整个操控范畴。CAN总线数据通讯具有安全、牢靠、实时和灵敏等特色,世界规范化安排为其拟定了IS011898规范。
设备作业过程中产生的振荡信号常常包括很多的设备状况信息,特别是设备前期毛病产生以及开展信息。经过对设备运转时振荡信号的收集与剖析,一方面能够实时在线监测设备的运转状况,另一方面能够记载设备产生反常或毛病时的特征信息,据此能够进行进一步的毛病剖析和确诊。
1 体系整体架构
整个体系由CAN总线网络数据收集器、网络服务器和客户端网络阅读三部分组成,如图1所示。体系经过在所需监测的设备上装置包括振荡和其他重要参数为首要丈量目标的各种传感器,获取设备的状况信息。数据收集器对上述信号进行收集并经过CAN总线传送到使用程序服务器进行剖析处理,处理结果存放到数据库服务器。Web服务器担任信息的发布,客户端经过阅读器拜访Web服务器发布的网页,完结对所统辖设备的长途监测和办理。体系一方面选用具有CAN总线功用的网络数采器上传监测数据,完结大规模散布设备的监测;另一方面经过Internet/Intranet散布监测数据和信息,完结跨地域的长途网络化监测。
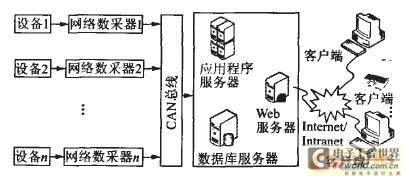
图1 体系整体架构
2 CAN总线网络数据收集
在体系架构图1中,网络数据收集器担负着重要人物,是本体系的中心部分。本文规划的网络数据收集器是一个全功用嵌入式多通道信号收集模块,结构框图如图2所示,由传感器、信号调度、信号改换、16通道模数转化、微处理器和CAN总线接口等组成。来自一台或几台相邻设备的多达16通道包括振荡在内的传感器信号,首要经过信号调度电路得到相应的电信号,关于振荡传感器还需要进行所需的改换,如加速度变速度和速度变位移等处理。这些信号经过扩大、抗混滤波以及极性改换后送到多路开关,模数转化巡回收集一切通道信号,微处理器进行必要的处理后再经过CAN总线发送给使用程序服务器。
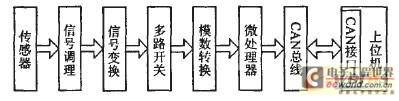
图2 CAN总线数据收集模块框图
CAN总线数据收集模块选用内核为CIP-51的嵌入式微处理器C8051F060。CIP-51具有规范8052的一切外设部件,一起内嵌契合CAN 2.0A(根本CAN)和CAN 2.0B(全功用CAN)的CAN总线操控器,包括一个CAN核、独立于C8051的音讯RAM、一个音讯处理状况机以及操控寄存器等。C8051F060的CAN操控器可到达1Mb/s速率。CAN有32个音讯目标,每个音讯目标有自己的标识掩码,用于对接纳到的音讯进行过滤。输入数据、音讯目标和标识掩码存储在CAN音讯RAM中。与数据发送和接纳过滤有关的一切协议处理均由CAN操控器完结,不需MCU干涉,使得用于CAN通讯的CPU带宽最小。经过C8051F060特别功用寄存器能够装备CAN操控器以及接纳和发送数据。
CAN总线数据收集模块一方面要完结多通道数据收集,另一方面还要进行数据通讯,其程序流程如图3所示。