摘要:本文首要介绍了PLC在柔性制作体系穿销机械手的使用,其次论述了加盖机械手的组成及操控流程。从PLC的操控原理视点,规划了穿销机械手操控流程图、电源体系图、PLC的I/O接口规划及它们的地址分配,经试验验证,达到了预期的操控意图。
现在,柔性制作体系(Flexible Manufacturing System,FMS),由主控计算机和相关软件进行操控和办理,进行工件的加工及转移,从而完结多种类变批量和混流办法出产的主动化制作。工业上的柔性制作体系的操控功用主要由工业计算机-PLC完结。本文的穿销机械手系FMS体系的一个单元,其主要完结工件的穿销定位功用。
1 穿销单元的结构组成
穿销单元的主要功用是经过旋转推筒推送销钉的办法,完结工件主体与上盖的实体衔接装置,完结装置后的工件随托盘向下站传送。其结构组成如图1所示。
2 穿销机械手操控流程图规划
穿销机械手操控流程图如图2所示。
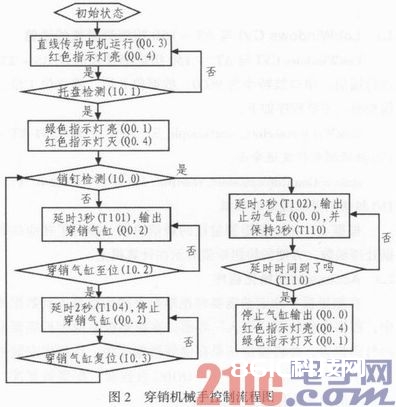
图中:1)初始状况:直线传送电机处于中止状况;销钉气缸处于原位(即旋转推筒处于退回状况);限位杆竖起禁行;作业指示灯平息。②体系启动工作后本单元赤色指示灯发光;直线电机驱动传送带开端工作且始终坚持工作状况(分单元工作时可选用与PLC工作/中止同状况的特别继电器坚持直线传送电机的工作状况)2)体系工作期间:①当托盘载工件抵达定位口时,托盘传感器宣布检测信号,且承认无销钉信号后,绿色指示灯亮,赤色指示灯灭,经3秒承认后,销钉气缸推动履行装销钉动作。②当销钉气缸宣布至位检测信号后完毕推动动作,延时2秒后主动退回。③气缸退回至复位状况且接收到销钉检测信号后,进行3秒延时,止动气缸动作使限位杆落下将托盘放行。(若销钉装置为空操作,2秒后销钉检测传感器仍无信号,销钉气缸再次推动履行装置动作,直到销钉装置到位)。④放行3秒后,限位杆竖起处禁行状况,绿色指示灯灭,赤色指示灯亮。体系回复初始状况。本站销钉接连穿3次后,传感器还未检测到有销钉穿入,报警器报警,此刻应在销钉下料仓内参加销钉。
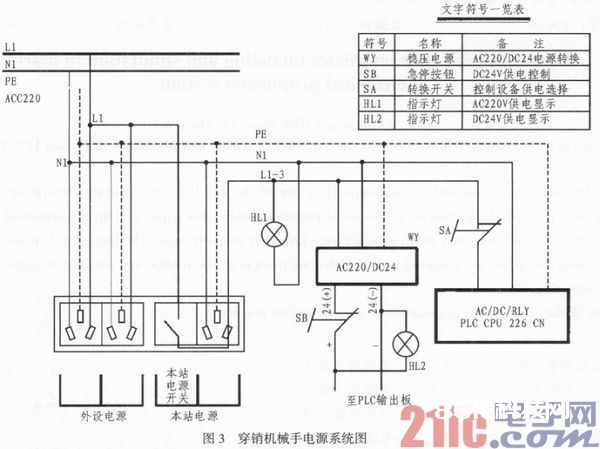
3 穿销机械手电源部分规划
穿销机械手电源规划图如图3所示。
4 穿销机械手I/O地址规划
穿销机械手I/O分配表表1所示。

5 完毕语
本文所规划的穿销机械手的PLC的操控电路,可靠性高,抗干扰能力强。经试验验证,彻底达到了实践操控要求,其操控办法值得广泛推行、使用。