



河北小漫电子商务有限公司为信路达授权代理商,提供技术支持,免费样品,现货库存等服务,电话: 400-1155-216 手机:18531077631 官网:www.xiaoman.net.cn

导读:科技中的激光测距、测速、测长等,这些仪器中都少不了激光传感器的存在,那激光传感器又是什么呢?本文将讲述激光传感器的原理,感兴趣的童鞋快来围观吧。激光传感器原理—&mdas
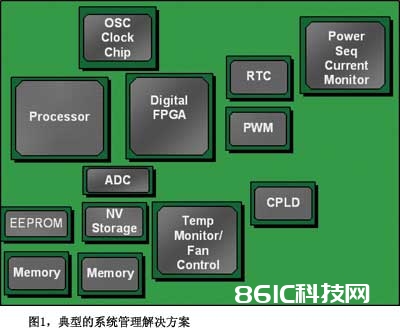
如何使用FPGA对系统设计实现有效管理-随着工艺几何尺寸越来越小,电子器件趋向于采用多种电压供电,因此越来越易受到电压和温度波动的影响,而且在所有电子系统设计中进行系统管理的重要性也不断增强。表面上好象无关的一系列任务其实都是以确保系统的正常运作为目标,系统管理任务的重点就是使系统正常运行的时间长、识别并传送报警条件,以及记录数据和报警的情况。面对由标准驱动的市场,OEM 厂商若要脱颖而出,当中的关键要素是产品的可靠性和正常运行时间。

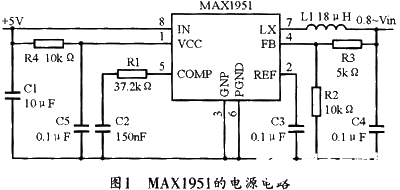
基于MAX1951实现Stratix II FPGA系统供电的设计方案-Stratix II是ALTERA公司生产的一款高性能FPGA器件。它采用TSMC的90 nm低k绝缘工艺技术生产,等价逻辑单元(LE)高达180 k,嵌入式存储器容量达到9 MB。该器件不但具有极高的性能和密度,而且还针对器件总功率进行了优化,同时可以支持高达1 Gbps的高速差分I/O信号,因而是一款超快的FPGA。该芯片中所含的高性能嵌入式DSP块的运行频率高达370 MHz。另外Stratix II还有12个可编程PLL,并具有健全的时钟管理和频率合成能力。能实现最大的系统性能。
基于EPF10K100EQ 240-132和Booth编码实现位浮点阵列乘法器的设计-随着计算机和信息技术的快速发展, 人们对微处理器的性能要求越来越高。乘法器完成一次乘法操作的周期基本上决定了微处理器的主频, 因此高性能的乘法器是现代微处理器中的重要部件。本文介绍了32 位浮点阵列乘法器的设计, 采用了改进的Booth 编码, 和Wallace树结构, 在减少部分积的同时, 使系统具有高速度, 低功耗的特点, 并且结构规则, 易于VLSI的实现。
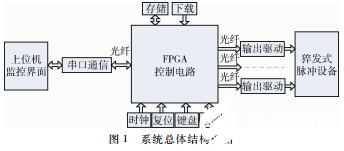
基于可编辑逻辑器件和VHDL语言实现猝发多脉冲产生系统的应用方案-脉冲功率技术是一种功率压缩技术,以较低的输入功率将能量缓慢存储起来,随后在极短时间内释放,以获得极高的峰值输出功率。该技术是应国防科技需要而发展起来的一门新兴科学技术,是获得高电压、大电流等极端电磁参数的重要手段,被广泛应用在科学研究和工业生产等诸多领域中。
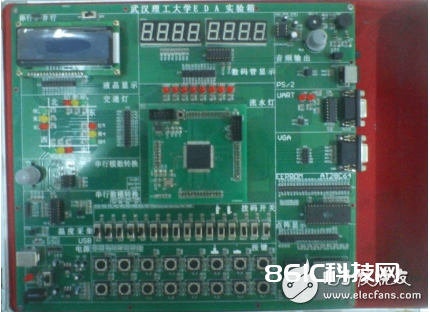
开关控制数码管的VHDL程序的设计与实现-本文主要介绍了开关控制数码管的VHDL程序的设计与实现。VHDL是一种应用广泛的硬件描述语言,设计者可以通过它编写代码,通过模拟器仿真验证其功能,完成逻辑综合与逻辑优化,最后通过下载到相应的可编程逻辑器件(如FPGA)中来实现设计。所编写程序经过下载到所用实验箱后,当分别拨动开关sw0—sw7时,在LED数码管上分别显示数字1—8,并且蜂鸣器发出声响

忆芯科技利用Veloce 硬件加速仿真平台进行高速企业级固态硬盘存储设计-Mentor Graphics公司今天宣布,忆芯科技 (Starblaze Technology) 已成功使用 Veloce 硬件加速仿真平台进行专业的高速企业级固态硬盘 (SSD) 存储设计。 忆芯科技对硬件加速仿真市场中目前现有的解决方案进行了长期详细的分析。最终选择和部署 Veloce 硬件加速仿真平台,是因为该平台具备卓越的虚拟化技术和存储协议支持、丰富的软件调试功能以及在提供创新性硬件加速仿真技术方面有口皆碑的成功经验。 企业级 SSD 市场正飞速发展,这就要求我们所使用的 SoC

常用的机器人编程方法有哪些-机器人编程【robotprogramming】为使机器人完成某种任务而设置的动作顺序描述。机器人运动和作业的指令都是由程序进行控制,常见的编制方法有两种,示教编程方法和离线编程方法。
