


摘要 针对单天线调频接连波雷达发射信号走漏问题,结合数字自适应体系数据处理能力强、精确灵敏、通用能力强等长处,提出了数字抵消技能计划,并进行了仿真剖析和试验验证,结果表明,该计划能有用按捺由于收发阻隔缺乏导致的发射信号走漏问题。
关键词 数字抵消;自适应;发射走漏
由于遭到体积、分量、本钱等约束,大都导引头选用单天线技能,导致收发阻隔缺乏,使发射信号走漏到接纳机中,而信号走漏或许导致接连波体系雷达接纳机灵敏度下降,引起中放饱满、微波混频器或前置低噪声放大器饱满。
跟着元器材的开展,毫米波前端器材的饱满功率,可达十几dBm以上,而在弹载环境中,接连波发射机功率一般在几百mW,因而,饱满不是首要问题,需求点处理走漏导致接纳机灵敏度下降问题。常用的射频抵消技能虽然能有用地按捺发射走漏信号,但在毫米波波段,没有矢量调制器可供运用,因而运用模仿的方法调整起伏和相位,难度较大。考虑到射频前端没有饱满,能够运用数字信号处理器数据处理能力强、精确灵敏、通用能力强等长处,选用自适应数字抵消技能使得由于收发阻隔缺乏导致的发射走漏信号得到最大极限的按捺。
1 自适应数字抵消基本原理
自适应数字抵消体系模型如图1所示。
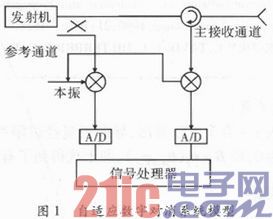
在该模型中,接纳机有两个独立通道:参阅接纳通道和主接纳通道。参阅通道对发射信号进行采样,主接纳通道包括发射走漏信号和方针回波信号。将主回波信号和参阅信号别离送入中频自适应数字抵消器,通过自适应调整参阅信号的起伏和相位,使其与主路信号中发射走漏信号起伏共同、相位相反,然后取得杰出的抵消作用。
自适应滤波器与一般滤波器不同,它的冲激响应或滤波参数随外部环境的改变而改变的,通过一段主动调理的收敛时刻到达最佳滤波的要求。抵消原理框图如图2所示。
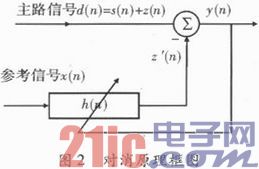
设主回波信号d(n)为方针回波信号s(n)与发射走漏信号z(n)之和,x(n)为参阅信号,x(n)与方针回波信号不相关,但与z(n)具有某种不知道的相关性,x(n)经滤波后发生和z(n)极为类似的信号z’(n),终究得到体系的输出y(n)=s(n)+z(n)-z’(n)。
假定z(n)、x(n)及s(n)是零均值的平稳随机进程。s(n)与z(n)不相关。而
y2(n)=s2(n)+(z(n)-z’(n))2+2s(n)(z(n)-z’(n)) (1)
对式(1)两头取数学希望,由于s(n)与z(n)、x(n)不相关,s(n)与z’(n)也不相关,故
E[y2(n)]=E[s2(n)]+E[(z(n)-z’(n))2] (2)
信号功率E[s2(n)]与自适应滤波器的调理无关,因而,自适应滤波器调理使E[y2(n)]最小,便是E(z(n)-z’(n))2]最小。又由于z(n)-z’(n)=y(n)-s(n),所以当E[(z(n)-z’(n))2]最小时,自适应走漏信号抵消体系的输出信号y(n)与有用信号s(n)的均方差E[y(n)-s(n))2]也最小,在抱负情况下,z(n)=z’(n),则y(n)=s(n)。
自适应滤波器最重要的部分是自适应算法,算法能够依据输入、输出及原参量值,依照必定原则修正滤波参量,使自适应滤波器能有用地盯梢外部环境的改变。
现在,自适应滤波算法首要有以下3种:
(1)根据维纳滤波器理论的最小均方差错LMS算法。该算法简略,运算量小,无需核算相关函数和矩阵求逆运算、易完结,在正确条件下可取得满足的功能。缺陷是收敛速率较缓慢,对抽头输入相关矩阵的最大特征值与最小特征值之比改变灵敏。即便这样,LMS算法依然运用广泛。
(2)根据最小二乘法的递推最小二乘法RLS算法。该算法长处是收敛速度快,盯梢能力强,但由于需求进行矩阵求逆,核算量比LMS算法大,使其运用遭到约束。
(3)根据卡尔曼滤波理论的卡尔曼算法。其收敛功能好、盯梢能力强、收敛速率具有鲁棒性(Robust)。对输入相关短阵特征值不灵敏;而且,该算法适用于平稳随机进程和非平稳随机进程。缺陷是该算法直接运用卡尔曼滤波公式中的矩阵表明式,算法杂乱、运算量大、数值稳定性差。
文中挑选LMS算法完结自适应数字抵消。






