


单兵作战用机器人体积小,便利单兵户外作战时带着,可完结侦查、作战、排爆等使命。机器人可以替代人类抵达不便利抵达或风险的环境,保证了战士的安全。车体是履带式规划,举动平稳。
1 单兵作战用机器人控制系统硬件规划
为了完成战士对机器人的实时控制,需求合作运用遥控制终端。机器人与遥控制终端的作业原理如图1所示。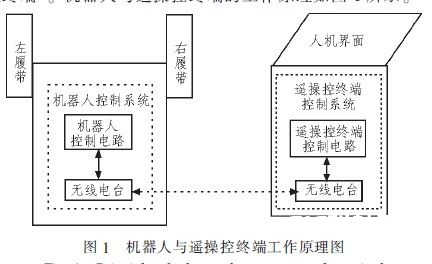
遥控制终端经过按钮、开关、摇杆收集作业人员的控制指令,将控制指令转化成数据,依照规则的格局经过串口发给无线电台,无线电台将该数据发送出去;机器人控制系统的无线电台接纳到来自控制终端的控制指令后,依照控制指令控制机器人运动、兵器击发,一起机器人控制系统收集机器人的GPS方位、电池电量、超声波避障信息等,把机器人信息打包后经过机器人上的无线电台发送给遥控制终端的电台,遥控制终端接纳到机器人信息后,将其显现在人机界面上,以备战士随时把握机器人的实时信息。
单兵作战用机器人控制系统是依据DSP芯片及与其外围电路、电源电路组成。DSP芯片选用TMS320F2812。TMS320F2812是美国TI公司推出的C2000平台上的定点32位DSP芯片,主频150 MHz、处理功能可达150 MIPS,每条指令周期6.67 ns。
TMS320F2812包含4M可寻址程序空间和4M可寻址数据空间。一起片内具有128×16位的FLASH存储器和18K×16位的SRAM。TMS320F2812选用3_3 V和1.8 V供电,功耗低。TMS320F28 12的外部接口非常丰富,16路12位的ADC收集通道,SPI、SCI通讯模块,多达56个复用I/O引脚。
单兵作战用机器人控制系统组成如图2所示。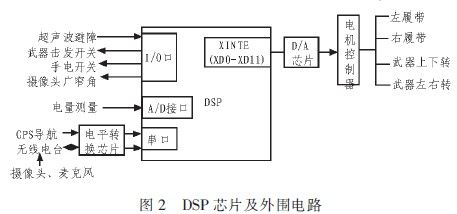
1.1 I/O端口
TMS320F2812的GPIOA0-GPIOA3口设置成根本输入输出端口,端口装备及特色如表1所示。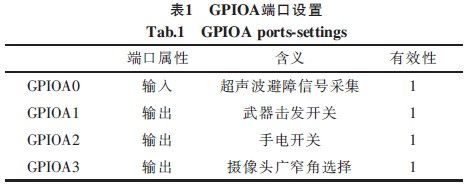
超声波避障信号用于勘探机器人前方0.5 m内是否有障碍物,如遇到障碍物,机器人可主动转弯避开。兵器击发开关用于机器人上兵器的击发控制,手电开关用于机器人上手电的开关控制,摄像头广窄角挑选用于机器人上摄像头的广角与窄角的切换。
1.2 A/D端口
TMS320F2812的A/D转化器模块共有16个通道,模仿电压的输入规模是0~3 V。这儿用了其间的2个通道,别离用来丈量机器人上的2块24 V锂电池的电量。图3中电量丈量电路分为3个部分:差分份额1:10电路,把24 V电压转化到0~2.4 V区间;阻隔份额1:1电路,能有用的阻隔输入电压与DSP的前端接口;电压钳位电路,将输入到DSP端口的电压钳位在3.3 V以内,避免电源电压意外浪涌时损坏DSP的A/D转化端口。2路24 V电池电压别离经过2路电量丈量电路后,输入到DSP的ADCINA0、ADCINA2两个端口,依据收集到的电压值,可计算当时电池的电压,然后确认电池电量。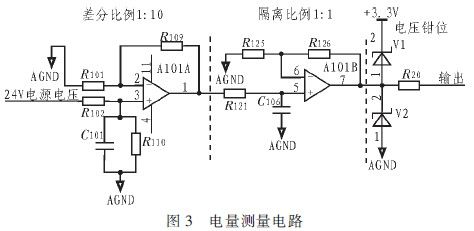
1.3 串 口
TMS320F2812的GPIOF4、GPIOF5装备成串口1,GPIOG4、GPIOG5装备成串口2。串口1接纳GPS的信息,用来确认当时机器人的方位信息;串口2衔接机器人电台,完成与遥控制终端电台的无线传输。机器人电台衔接摄像头和麦克之后,可以把影音信息传送到遥控制终端的电台,遥控制终端的作业人员即可接纳到机器人邻近的视频、音频信息。
1.4 电机控制
机器人的行进、撤退、左转、右转由左履带电机和右履带电机控制。机器人上的兵器经过做上下、左右调理来瞄准方针。
DSP的XINTF是其外部接口,这儿运用了XD0-XD11共12根数据线,经过电平转化为5 V电平后,衔接到D/A转化芯片。D/A转化芯片选用了12位的AD664,可输出4路0~5V模仿电压,4路模仿电压作为控制电压输入到电机控制器,别离控制机器人左履带电机、右履带电机、兵器上下调理电机、兵器左右调理电机。
当电压为2.5 V时,电机停转;电压小于2.5 V时,电机回转;电压大于2.5 V时,电机正转。对于左履带和右履带,经过输出的控制电压,可完成车体行进、撤退的无级变速,以及左、右转弯的运动控制。
1.5 电源供电电路
锂电池具有体积小、重量轻、容量大的特色。机器人内置2组24 V供电电池。第1组24 V电池为左履带电机、右履带电机、兵器上下调理电机、兵器左右调理电机供电。第2组24 V电池经过DC/DC模块.转化成12 V电压和5 V电压。12 V电压用来给机器人上的无线电台供电。5 V电压为控制电路供电,一起经过电源转化电路,转化成3.3 V和1.8 V电压为DSP供电。为了监测DSP芯片供电电压是否正常,增加了电压监控电路,当DSP芯片供电不正常时,可将此毛病报送到电台发送到遥控制终端。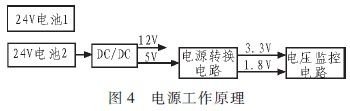
2 单兵作战用机器人控制系统软件规划
单兵作战用机器人控制系统软件分为主程序和中止服务程序两部分。主程序完成的流程如图5所示,上电初始化处理器的I/O端口、A /D端口、串口等资源,初始化结束开端与遥控制终端软件进行通讯,握手成功后,敞开软件守时器、中止,守时收集机器人信息,包含超声波避障、电量丈量值、GPS信息。
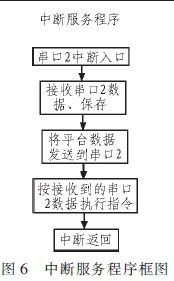
当串口2即机器人无线电台呈现接纳数据中止时,标明接受到来自遥控制终端的控制数据,此刻处理器进入中止服务程序,如图6所示。中止程序首先将串口2接纳到的数据保存到寄存器,然后将最新收集的机器人信息依照预订格局发送到串口2,经过机器人无线电台发送给遥控制终端。程序还需求依据串口2所接到的数据,依照预订的格局分配到处理器的各个端口,完成遥控制终端的控制指令,包含兵器击发开关、手电开关、摄像头广角窄角切换、左履带电机滚动方向和速度、右履带电机滚动方向和速度、兵器凹凸滚动方向和速度、兵器左右滚动方向和速度。
3 结束语
单兵作战用机器人便于带着、控制简略、可广泛使用于戎行、武警部队。文中所规划的单兵作战用机器人控制系统实时性高、规划合理,理论实验验证可行,在实践使用中得到了用户的认可。






