


1.导言
振荡直接影响到风机的安全安稳运转,严峻时还会导致设备损坏等恶性事故的产生。在对风机振荡进行监测时,厂方大都只注重振荡的幅值,即以振荡的巨细作为振荡监测、剖析和状况检测的依据。这种办法尽管在大都情况下有用,但在一些特别情况下,却会掩盖振荡现象,形成技能人员的误解。跟着现代测验技能的展开,振荡相位的丈量技能已越来越牢靠。技能人员经过振荡相位丈量,对振荡问题的知道将会大大加深。本文结合笔者处理过的几台风机振荡毛病,介绍了依据振荡幅值和相位的矢量监测模型以及相位在振荡剖析中的重要性。
2.相位的概念和丈量办法
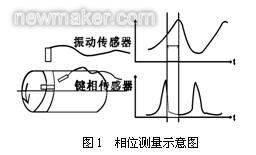
如图1所示,在旋转轴上开一缺口,用涡流传感器对准转轴,当轴上缺口转到涡流传感器处时,涡流传感器脉冲输出。一起用振荡传感器丈量轴的振荡,得到相应的轴振信号,比较轴振信号与脉冲信号,求出脉冲到这以后振荡信号最大点之间的视点差,即以此为相位。键相脉冲的产生也能够经过在转轴上刷黑漆和贴反光带,使用光电传感器光电效应的办法来获取。
振荡监测时,厂方大都只注重振荡的巨细。当振荡超越设定阈值后,就开端报警或主动停机。这种办法实践上是把振荡问题简略化,也便是把振荡量作为一个标量来看待。有了相位后,对振荡问题的知道除了巨细外还有视点。此刻振荡就能够用如图2所示的“靶图”来表明。振荡问题由此而成为一个矢量概念。在透平机械振荡监测中,已有一些国家选用联合振荡幅值和视点的矢量模型对机组进行监测。这种办法是以某一区域作为安全区,一旦振荡矢量点落到安全区外,机组便会报警或采纳维护动作。

某台轴流压缩机大修后开机,运转中发现振荡较大。该机振荡经常在50~70μm之间改变。考虑到振荡改变起伏在20μm左右,而振荡的基数为50μm,显着偏大,起先简略地以为该机振荡仅仅一平衡问题。但当到现场测验时,发现情况彻底不同。机组开机?h内的振荡改变能够简略地表明为60∠90°→50∠180°→70∠260°。尽管振荡振幅的改变在50~70μm之间,改变起伏不大,但考虑了相位后,发现振荡改变起伏很大,到达了130μm左右。如此大的改变起伏必定不只仅是不平衡毛病引起的。翻开机组查看发现,转子两头气封冲突很严峻,转子外表部分磨得发蓝。进一步查看发现,转子在气缸里歪斜,调整转子与气缸的同心度后,再次开机,振荡平稳,经过一次动平衡实验,使运转到达安稳。
5.依据振荡矢量的动平衡一次加剧法
现在,许多企业风机动平衡作业依然选用传统的三点法。这种办法只需依据振荡幅值,经过在转子圆周上3个方位试加剧的办法来确认动平衡配重。这种办法尽管看起来简略,可是机组需求重复启停屡次,不只费时、吃力,并且动平衡精度也不是很高。
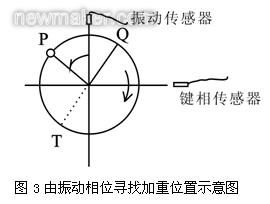
有了相位后,能够由振荡相位推算出不平衡地点视点。以图3所示传感器安置为例进行剖析。相位反映的是振荡信号高点滞后于键相信号之间的视点,因而,由振荡传感器反转一个相位角,即可找到振荡高点P。由振荡理论可知,不平衡力总是超前振荡高点一个滞后角 ,因而由高点P顺转一个滞后角,即可找到不平衡地点方位Q。不平衡地点方位的对面T便是应该加平衡配重的方位。假定振荡相位45°,取滞后角90°,由图3可知,实践加剧方位即为由转轴上键相符号反转225°处。选用这种办法,现场动平衡一次成功的准确率可达70%以上,大大削减了开机次数和作业强度。依据经历,动平衡实验时,试加剧的视点较量加剧的巨细要重要得多,而试加剧的视点直接取决于振荡相位角。试加注重点正确,加剧前后振荡则会有显着改变,这以后的动平衡进程也会展开得很顺畅。
相位是振荡剖析中一个非常重要的参数。有了相位后,人们对振荡问题的知道从标量展开到矢量。联合振荡幅值和相位的振荡矢量监测法会更全面、更早地监测振荡毛病的产生与展开进程,以加深对振荡问题的知道。有了相位后,技能人员能够完成对不平衡毛病的一次加剧,可大大削减动平衡作业的作业量,一起也能大大提高动平衡精度。






