在任何功用的背面,都有必要有硬件的支撑,就像数码相机仅仅有镜头还不行,也需求机身里的那块 CMOS 或 CCD 芯片,并且,在数码年代,这个芯片水平怎样,直接决议了相机的层次。
而在轿车上,需求用到对比相机里多得多的芯片,它们被称为“电子控制单元”,也便是 ECU(Electronic Control Unit)。许多人以为 ECU 特指发动机程序,但事实上,整个车子的电子体系由十分多的 ECU 组成,它们别离用来控制车子的各种功用,比方车灯、文娱体系、防盗体系等等。
跟着车子电子化程度越来越高,尤其是自动驾驶、自动安全等功用的添加,车子的 ECU 会急速添加,有猜测说,在未来五年里,车子里的 ECU 平均会到达 50-70 个,而现在一些电子结构杂乱的车子,ECU 数量早就超过了一百。
可是,这篇文章聊的不是ECU 究竟能多到什么程度,而是怎样把 ECU 简化。
从1对1到一对多
评论这个论题,咱们以现在最火的自动驾驶举比如。在一辆自动驾驶车里,或许包含激光雷达、毫米波雷达、中距离雷达、前摄像头、后摄像头号不同的传感器,而一般的做法是,每一个传感器都由一个芯片负责处理数据。
支撑起自动驾驶的数据量、运算量都是巨大的,而这些芯片,都要在一张 CAN 总线的网络上去布置(特斯拉运用的以太网和它们比较太超前了),它的问题在于:这个网自身就慢。究竟有多慢?能够看下面这张图:
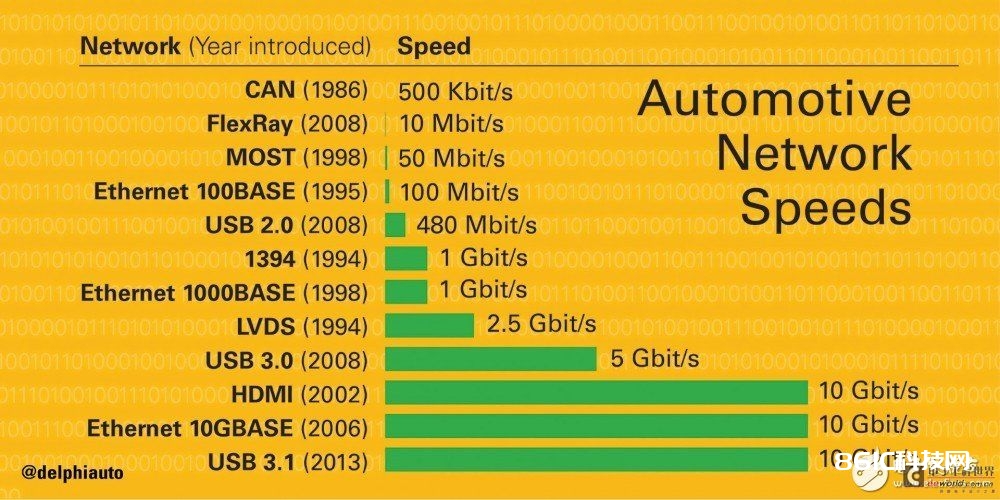
网络本来就慢,再加上这些芯片是涣散排布,数据交换是快不起来的,芯片越多,功率越低。这样还怎样玩自动驾驶?
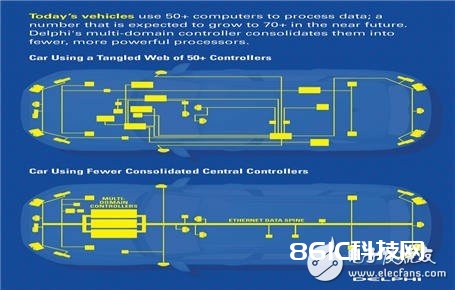
把1对1变成一对多就成了一种处理方法,把这些芯片会集到一同,用数量更少的芯片组或者是一个运算才能超强的芯片作为神经中枢,去合作那些传感器进行作业,在轿车电子网络布置上,这就意味着简化。
假如依照传统的轿车电子架构,想加更多功用,就要挂更多的 ECU 上去,要加强运算才能,也得经过加更多 ECU 的方法,可是,跟着数据传输的容量要求越来越大,靠添加 ECU 的数量就行不通了。
这种先天和后天的好坏,有过装饰经历的人应该懂,就像做水电改造相同,前期打好根底的话,后续的晋级改造都会轻松不少。
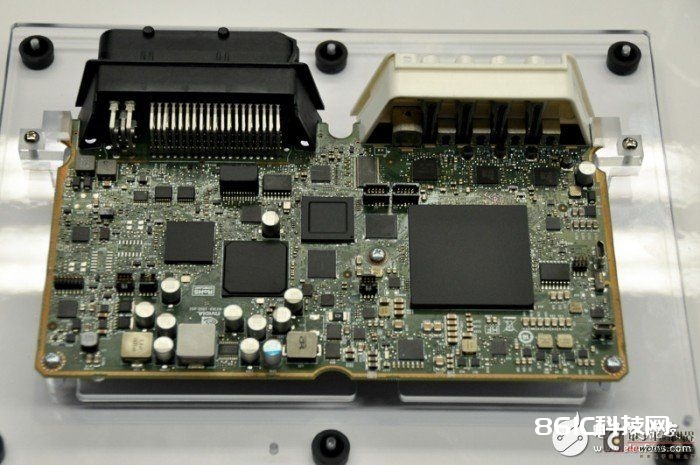
这种一对多的方法,在车子里能够称为“多域控制器”(Multi-Domain Controllers),可是现在并没有被应用在量产车里。在零部件供货商德尔福的上海总部观赏时,我看到了一个多域控制器样品:

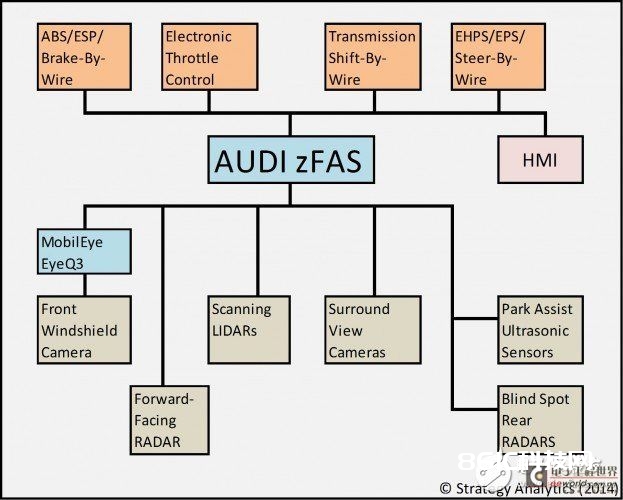
假如你这两年比较重视轿车电子,应该知道奥迪展出过名为“zFAS”的自动驾驶控制模块,这其实就能够理解为德尔福那个多域控制器的“奥迪定制版”。奥迪先后展现过两个版别的 zFAS,第二版比第一版更精简,集成度更高。


它看起来像一块主板,以二代为例,上面集成的芯片包含:Altera’s Cyclone V SoC FPGAs、32 位 TriCore Tm based multicore uController、Mobileye EyeQ3、NVIDIA Tegra K1 处理器,能够完成完好的数据、规划、决议计划处理,并且,从传感器到这个“主板”,运用的是以太网传输数据。并且,除了自动驾驶功用,它还集成进了许多和车辆控制有关的功用。
德尔福的工程师还举了一个比如:当液晶仪表盘和中控屏幕运用同一个处理芯片时,它们就会更严密的成为一个全体,分工合作的去显现不同的内容,供给更好的 HMI 体会。
集成化究竟有多重要?
其实,这个原因不难理解。
或许咱们平常买车、用车看的仅仅外观、动力、控制,但事实上,在这些东西背面,轿车的电子电气架构才是真实的“骨骼”。现在的大部分车子仍是用的那套老旧骨骼,但现实是,轿车的智能化程度要越来越高,传统的电子架构很难满意这种需求(前面现已说过),所以,就需求车子用一种全新的架构来应对这种智能化趋势。
当然,更强的核算才能是有必要的。
而从另一个视点来说,也正是由于智能化程度的进步,车子关于电子安全方面的要求越来越高,更集成化的架构,有助于更好的去布置防御机制。
芯片的集成化意味着车子真实变成了一个全体。假如说未来的轿车是一个电脑+四个轮子,那么“一个电脑”就意味着把本来漫步的处理芯片都集合到一同(当然,并不是一切 ECU 都能够集成进来)。都喜爱说“体系”,这其实便是体系上的改动。
再聊回到自动驾驶上,跟着自动驾驶等级的不断提高,芯片集成化的趋势会越来越显着。