


高档定时器与通用定时器比较相似,下面是一个TIM1 的PWM 程序,TIM1是STM32仅有的高档定时器。共有4个通道有 死区有互补。
先是装备IO脚:
GPIO_InitTypeDef GPIO_InitStructure;
/* PA8设置为功用脚(PWM) */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/*PB13 设置为PWM的反极性输出*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
/*开时钟PWM的 与GPIO的*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
/*装备TIM1*/
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
voidTim1_Configuration(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_DeInit(TIM1);//重设为缺省值
/*TIM1时钟装备*/
TIM_TimeBaseStructure.TIM_Prescaler = 4000;//预分频(时钟分频)72M/4000=18K
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;//向上计数
TIM_TimeBaseStructure.TIM_Period = 144;//装载值 18k/144=125hz 就是说向上加的144便满了
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;//设置了时钟切割不明白得不论
TIM_TimeBaseStructure.TIM_RepetitionCounter = 0x0;//周期计数器值 不明白得不论
TIM_TimeBaseInit(TIM1,&TIM_TimeBaseStructure);//初始化TIMx的时刻基数单位
/* Channel 1 Configuration in PWM mode 通道一的PWM*/
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //PWM形式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//正向通道有用 PA8
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable;//反向通道也有用PB13
TIM_OCInitStructure.TIM_Pulse = 40; //占空时刻 144 中有40的时刻为高,互补的输出正好相反
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //输出极性
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_Low; //互补端的极性
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Reset;//闲暇状况下的非作业状况 不论
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCIdleState_Reset;//先不论
TIM_OC1Init(TIM1,&TIM_OCInitStructure); //数初始化外设TIMx通道1这儿2.0库为TIM_OCInit
/* TIM1 counter enable开定时器 */
TIM_Cmd(TIM1,ENABLE);
/* TIM1 Main Output Enable 使能TIM1外设的主输出*/
TIM_CtrlPWMOutputs(TIM1,ENABLE);
}
//设置捕获寄存器1
voidSetT1Pwm1(u16 pulse)
{
TIM1->CCR1=pulse;
}
/*操作寄存器改动占空时刻*/
/*****************************************************************************************************************
TIM1的定时器通道时刻 1到4 分别为 PB8 PA9 PA10 PA11 而互补输出分别为 PB13 PB14 PB15
间断 PB12 。

假如输出与互补输出极性相同的话 就刚好输出高 互补低 至于PWM形式1 与形式2的差异
在下图:
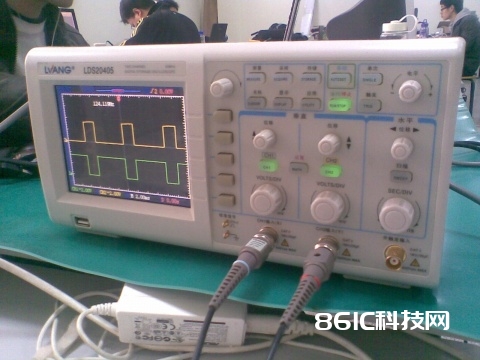
这个是形式1的 了绿为输出 黄为互补
*************************************************************************************************

上图是形式2的状况 正好和形式1的反过来了 144中有40 为高 互补的有40为低。
*************************************************************************************************/
//在MAIN 中加点键盘扫描啥的 用来改动占空比
/************************************************************
**试验称号:PWM
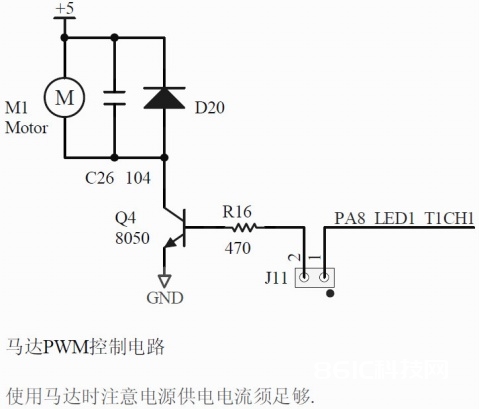
**功用:是PA8发生PWM输出,PA8为驱动LED1和马达的IO,
经过UP DOWN键,能够改动占空比,然后让ED1和小马达的发生改变
**注意事项:LED是低有用,马达则是高有用,所以LED全灭的时分马达转速到达最高.
**作者:电子白菜
*************************************************************/
#include”STM32Lib\\stm32f10x.h”
#include”hal.h”
extern voidSetT1Pwm1(u16 pulse);
intmain(void)
{
u16 pulse=40;
ChipHalInit();//片内硬件初始化
ChipOutHalInit();//片外硬件初始化
for(;;)
{
if(GET_UP())
{
while(GET_UP());
if(pulse<=144)
{
pulse+=5;
SetT1Pwm1(pulse);
}
}
if(GET_DOWN())
{
while(GET_DOWN());
if(pulse>30)
{
pulse-=5;
SetT1Pwm1(pulse);
}
}
}
}
/***************************************************************************************/
再来两张 最小体系板子
/***************************************************************************************/

你也只需一块这样板子再来一点时刻与干劲这个进程相同跑的起来。






