智能小车驱动电路是一个全桥驱动电路, Q1,Q2, Q3, Q4四个三极管组成4个桥臂, Q5 操控Q2和Q3的导通和关断, Q6操控Q1 和Q4 的导通和关断, 驱动电路别离用于后轮动力驱动电路和前轮方向驱动电路。当1管脚为高电平, 2管脚为低电平不时Q1 和Q4 导通, Q2和Q3截止, 电动机带动车轮工作; 当1管脚为低电平, 2管脚为高电平不时Q1和Q4截止, Q2和Q3导通, 电动机带动车轮反向工作。



智能小车驱动电路是一个全桥驱动电路,Q1,Q2,Q3,Q4四个三极管组成4个桥臂,Q5控制Q2和Q3的导通和关断,Q6控制Q1和Q4的导通和关断,驱动电路分别用于后轮动力驱动电路和前轮方向驱动电路。当
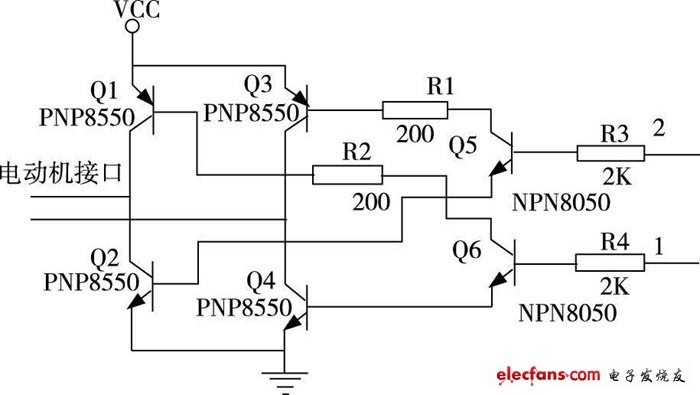
智能小车驱动电路是一个全桥驱动电路, Q1,Q2, Q3, Q4四个三极管组成4个桥臂, Q5 操控Q2和Q3的导通和关断, Q6操控Q1 和Q4 的导通和关断, 驱动电路别离用于后轮动力驱动电路和前轮方向驱动电路。当1管脚为高电平, 2管脚为低电平不时Q1 和Q4 导通, Q2和Q3截止, 电动机带动车轮工作; 当1管脚为低电平, 2管脚为高电平不时Q1和Q4截止, Q2和Q3导通, 电动机带动车轮反向工作。






