


本无线地磁车辆检测传感器计划,主要由Freescale公司的微型、低功耗、3轴数字地磁仪MAG3110和TI公司带无线射频收发器核的低功耗微处理器CC430F5137组成。该传感器能够应用在泊车场智能泊车引导、智能交通管理等工程中,具有准确率高、对地上损坏小、装置便利等特色[1]。
1 泊车场智能引导体系原理介绍
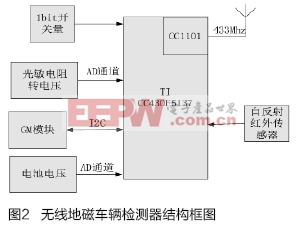
无线地磁车辆检测器是使用磁敏传感器实时检测车辆对地磁的影响,以判别泊车位上是否有车辆停放,并将检测数据经过无线方法传送给无线检测接纳机。

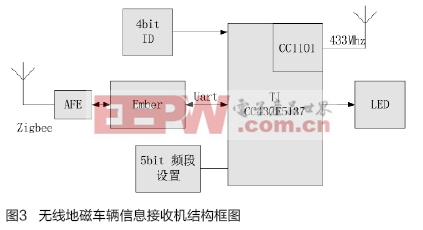
无线车辆检测接纳机能接纳无线地磁车辆检测器发送的信息,再经过无线或有线上传到控制中心。无线检测接纳机可接纳通讯间隔范围内30个无线车辆检测器的信号。泊车场智能引导体系拓扑图,见图1。无线地磁车辆检测器的结构框图,见图2。无线地磁车辆信息接纳机的结构框图,见图3。
2.1 无线地磁车辆信息接纳机的硬件规划
无线地磁车辆信息接纳机选用TI的CC430F5137处理器结合ember的Em357为中心的Zigbee Pro模块规划。供给RS232接口与服务器链接。外壳用金属屏蔽机箱,能够挂墙装置,天线外置。
2.2 无线地磁车辆检测器的硬件规划
无线地磁车辆检测器选用地磁检测芯片MAG3110结合CC430处理器规划。经过地磁场检测来判别车辆,遍及选用两种方法:对车辆经过期磁力线歪曲状况检测来判别;或则,检测车辆经过期对磁场的笔直和水平方向的磁场强度改变来判别[3]。本文的研讨重点是判别某预订区域(泊车位)是否有车辆的存在,选用后一种判别方法。轿车作为铁磁体,当其接近地磁传感器时会引起磁力线的改变,经过监测这些细小改变,能够判别车位是否有轿车的存在。为了进步对泊车位有无车辆判别的准确率,本次研讨选用三轴磁阻传感器,结合光敏电阻和反射式光电传感器进行混合规划。
地磁车辆检测器选用敞开的ISM微波频段,选用433MHz无线传感技能。内置高性能锂亚硫酰氯电池供电,选用低功耗规划可接连作业3到5年。
设备外壳规划相似圆形道钉结构,用高强度ABS和PC资料注塑成型,外形尺寸:直径126mm×高32mm。防水,抗酸碱腐蚀,抗抵触。
2.2.1 中心处理器模块
地磁车辆检测器也是选用CC430F137主控制器,无线部分处理电路同接纳机共同。外部接口电路还包括电池电压检测、地磁传感器、光敏电阻丈量、反射式光电传感器丈量和干簧管开断检测等电路。
2.2.2 地磁丈量接口
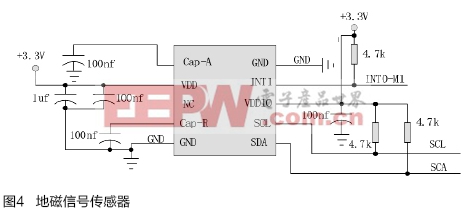
地磁丈量由Freescale的地磁信号传感器MAG3110组成[4]。该器材为3轴传感器,水平放置于与CPU间隔120mm的线路板一侧,以削减PCB(印制电路板)发生的电磁搅扰对其影响。外围电路见图4。
2.2.3 光敏电阻和反射式光电传感器检测电路
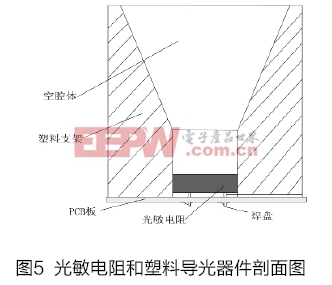
光敏电阻检测用于进步对是否有车判别的准确率。本研讨选用了电阻值为10kΩ的掺杂型光敏电阻,对(0.4~0.76)μm可见光呼应,直径5mm。
为了尽可能防止斜射光源的搅扰,规划时对光敏电阻的光感触面装置一个塑料导光器材,检测器外壳开孔镶嵌平面透光镜,装置模拟图见图5。
反射式光电传感器检测电路,需求耗费较大的功率,规划仅用于人工不定期对车位当时有无车辆的校准,经过服务器操作完成。规划选用检测间隔为大于800mm的漫反射式光电传感器材。






