


我参加了本年在拉斯维加斯举办的消费电子展会(CES),并设法乘上了在关闭路途上以12.5mph速度行进的Inducts公司无人驾驭轿车Navia。整个进程给我的感觉十分安全。但我仍是不能必定定心将作为司机特有的操控权交给软件、激光雷达和摄像机。
商用飞机在飞翔进程中运用主动驾驭、主动挨近与着陆软件现已有很长时刻了,但它们不用处理路途中忽然呈现的行人,或许在后车中忙着操作短信而没有观察到前面车速减慢然后快速撞向你后保险杠的人。

Inducts公司的无人驾驭轿车Navia
令人高兴的是,业界正在软件和电子操控功用方面做许多开发作业,这些软件和电子操控功用有望进一步完善主动驾驭轿车的安全性和终究完成。下面让咱们了解其间一些技能的开展。
滑铁卢大学
Steven Waslander和Nuvation在主动驾驭轿车方面组成了一个很好的团队,他们宣布的论文和开发的测验盯梢渠道证明理论方案是令人满意的。Nuvation公司的首席履行官Mike Worry是滑铁卢大学电子工程专业结业的研讨生,他与滑铁卢大学签署了一个为期4年的研讨协议,方针是为主动驾驭轿车研制新产品。
主动驾驭轿车轮胎动力功用的重要性
主动驾驭轿车的动力功用对乘客、行人和路途上其它轿车的安全性来说至关重要。这些动力功用供主动驾驭轿车中的操控器运用,需求得到很好的了解并经过严厉的测验,才干证明主动驾驭轿车的安全性。最近的一些操控器规划正在测验操作轿车使其挨近轮胎冲突极限,以便最大极限地进步轿车功用。
轮胎/路途冲突力和它们的相互效果在主动驾驭轿车动力功用方面起着重要的效果。滑动圆圈(Slip Circle)(图1)显现了轮胎产生的最大力。
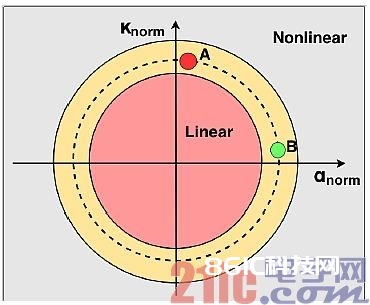
图1:滑动圆圈中的水平轴作为归一化的侧滑视点,垂直轴作为归一化的纵向滑动比。A点是一个高滑动比和低滑动视点的点,代表轿车加快时的景象。B点是一个低滑动比和高滑动视点的点,代表轿车猛打方向时的景象。虚线代表轿车正以冲突极限值行进。(摘自参考文献1)
研讨小组测验估量滑动圆圈的参数,由于滑动视点和纵向滑动可以猜测轿车的动力功用。他们发现,可以经过准确的GPS和惯性丈量单元(这是由最近被飞兆公司收买的Xsens公司界说的)的丈量值核算滑动视点。问题是这种办法对噪声十分灵敏,现有商用轿车上的低成本传感器无法很好地支撑。这些问题提示研讨人员考虑估量/观测器算法,见图2。
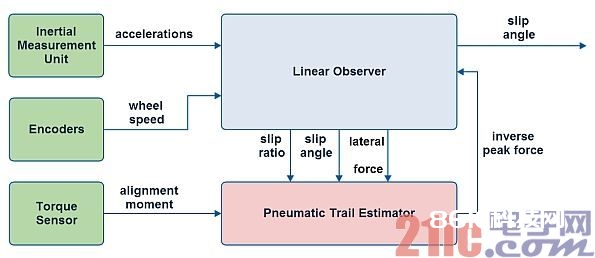
图2:带轮胎拖距估量器的观测器框图(Nuvation供稿)。
扩展卡尔曼滤波器(EKF)开发用于估量轮胎在路面上产生的滑动视点和纵向滑移。现实标明,EKF只能在线性轮胎区准确作业,在非线性区不能准确作业。
粒子滤波器(PF)可以对滑动视点作出较为准确的估量,价值是运算强度较高,无法做到实时估量。
试用无迹卡尔曼滤波器(UKF)标明,尽管它们可以得到好的成果,但这种办法也是根据商用轿车中不常见到的传感器。
最近的研讨以为,运用轮胎拖距也许是用于估量轮胎/路途冲突系数和横向轮胎力的更好挑选。但是,这种办法也有优缺陷。这种办法好像可以很好地估量冲突系数和横向轮胎力,线性观测器也能准确地盯梢线性和非线性区的侧滑视点。并且这种办法较少依托模型和轮胎参数的精度,核算也简略,可以运用现在在大多数商用轿车上装置的传感器。这种办法的缺陷是,它有一些前提条件,包括后轮驱动轿车,可疏忽的纵向车轮动力(加快和刹车)(这将约束准确地盯梢挨近滑动圆圈水平轴区域的滑动视点)。
参考文献1中的文章运用了根据轮胎拖距的观测器规划,其间增加了纵向轮胎动力功用,因而可以在整个滑动圆圈域中得到准确的滑动视点估量值。Dugoff轮胎模型用于核算轮胎/路途力,由于它比大多数其它模型更准确,运用更少的参数,对准确的轮胎参数依赖性也更低。
这篇文章和所用办法的结论是,这种规划的反响速度快,不需求贵重的传感器。这种办法已被证明在功用上超越其它常见的观测器规划。现在这种模型只运用单轨自行车模型,但今后可以修改为更准确的四轮轿车模型,然后估量出其它轿车动力功用。
这是承受主动驾驭轿车上路的杰出起点,但在定心肠将方向盘、油门和刹车交给任何彻底主动驾驭体系之前还有很长的路要走。
自习惯巡航操控和追尾磕碰防止
这些是可以并且正在被应用于未来全主动驾驭上路轿车的功用。除了轿车四周的盲点后视镜和安全摄像机外,任何可以得到的辅佐功用都将更好地帮忙分神和大意的司机削减事端。
许多轿车现已在运用自习惯巡航操控(ACC)功用来进步安全性和舒适性。现在咱们正在等待运用轿车到高速公路通讯技能帮忙进步交通功率,就像加州那样,终究开展成车到车通讯。为了到达这个目的,咱们需求完成协作性自习惯巡航操控(CACC)。这将在轿车之间引进无线通讯技能,完成更近的轿车安全间隔和更少的“幽灵式交通拥堵”。这种现象是“人类”司机在交通高峰期互相跟车太近、即便有一辆车轻踩刹车、后车司机都会连续反响然后将此工作扩大而产生的。这种现象也被称为车流不安稳性。CACC可以用来彻底消除这种现象。
GCDC(Grand Cooperative Driving Challenge)安排宣称,GCDC团队成员间互相竞赛适当剧烈,都旨在规划和完成最高效的协作型轿车体系。这种体系可以在各种协作性场景中履行先进的操作。为了到达这个目的,轿车之间有必要经过无线通讯交流有关它们方位和目的的信息,如图3所示。

图3:GCDC应战安排支撑针对实践高速路途上的协同驾驭进行立异性技能的开发。(相片由GCDC供给)
下面是GCDC对作为终极驾驭形式的主动驾驭轿车的谈论:
鉴于拥堵、交通安全和排放问题,路途交通将持续面对严峻的应战。协作型和主动驾驭体系在某种程度上可以让司机从驾驭作业中解放出来,可能为其间一些问题供给处理方案。
现在商场上存在不同程度的主动驾驭体系,而在一切交通条件下可以彻底主动驾驭的轿车离现在还很悠远,不过先进驾驭辅佐体系(ADAS)现已进入商场。自习惯巡航操控和车道坚持辅佐体系便是明证。
协同驾驭的要害是通讯。信息交流可以完成轿车之间、轿车和路旁边体系之间的协作。比方了解有关事端和风险等行将呈现的交通状况的前期告警,可以完成愈加高效和安全的交通流量。
在2011年的GCDC中,轿车的CACC运用带前馈元件的线性反应操控器,如图4所示。
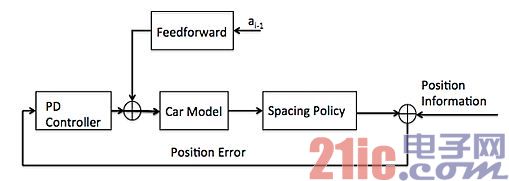
图4:运用带前馈元件的线性反应操控器的反应操控模型(搞自参考文献3)
份额微分(PD)操控器
PD(Proportional Derivative)的增益经过试验选取,前馈操控器规划用于进步高速路途上的车流安稳性。这儿运用了简化的轿车模型,其参数对反应操控器几乎没有影响。这儿的要害方针是运用可以彻底自习惯轿车模型中改动的操控器,以便可以在实践路途驾驭条件下运用。
现有的份额微分操控办法无法包括由本文较早前所说的侧向操控器和滑动圆圈引起的约束。假如咱们想要得到习惯实在高速公路和一般公路的可行作业体系,这些问题都需求处理。
这儿的动态模型运用了源自参考文献4的模型猜测操控(MPC)技能。假定轿车有2个激光雷达,一个坐落车前部,一个坐落车后部。所提出的操控模型如图5所示。
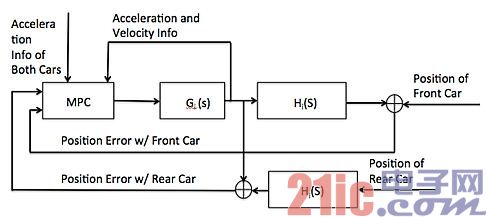
图5:所提出的操控模型(摘自参考文献3)。
这种模型使得,当后方车辆离得很远时,差错不会累积。每辆轿车都装备有无线数据接纳器,用于一起接纳前方和后方车辆的加快信息,见图6。
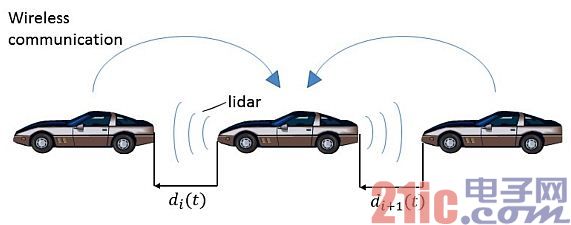
图6:每辆车都装置有无线数据接纳器,可以一起接纳前方和后方车辆的加快信息。
参考文献3写道:
开关根据的是

。假如

小于10米,那么随后便是6个状况的跟从式MPC模型,并运用追尾磕碰检测。不然就运用由Kianfar et al开发的状况MPC,并且只运用前方车辆磕碰检测。这样可以保证咱们的操控器在大多数状况下都与大部分其它MPC操控器相同作业,并且在要害时分会更超卓。
其间
和
是车辆之间的间隔差错。这种差错在抱负状况下应该是零。这两个差错都设置有最小约束条件,并且坚持用MPC查看车辆之间的速度和速度差错。为了保证体系呈现出车流安稳状况,当加快度是正值时,咱们需求使轿车的加快度总是小于前方车辆的加快度。假如加快度是负值,车子的加快度就变成更低的限值(前方轿车存在速度差错的上限和下限值,但后方轿车只要更低的限值)。
参考文献3中说到的这个团队在Nuvation的帮忙下现已建立了一个渠道,可以用来在测验轨道上运转的1/5巨细的长途操控电动轿车模型上测验一切CACC算法。

图7:坐落测验轨道上的1/5尺度的遥控电动轿车模型。这些轿车可以到达120km/h的速度(Nuvation供给)。
本文小结
今日的轿车上现已有巡航操控功用操控着油门踏板。一些轿车具有车道违背防止和安全摄像机。咱们将向选用CACC的未来主动驾驭轿车迈出第一步,这将导致追尾磕碰防止功用的追加和更平顺、更安全的交通流量。
在华尔街日报的一篇文章中,日产轿车公司透露在2020年之前将发布多种主动驾驭的功用。日产的首席履行官Carlos Ghosn表明,现在有4种社会经济趋势与主动驾驭(Autonomous Drive)轿车有关——全球巨型城市的呈现、对联网要求的增加、人口老化以及商场中妇女的影响力和购买力的增加。
日产的下一步方案是:
交通拥堵导航。到2016年年末,日产将供给可以在拥堵的高速路途上主动驾驭并且安全的轿车。
彻底主动化的泊车体系。相同到2016年末之前,日产将在更大规模的轿车上装置彻底主动化的泊车体系。
多车道操控。到2018年,日产方案供给可以主动判别风险并改动车道的轿车。
穿插路口的主动驾驭。到2020年,日产将推出穿插路口主动驾驭功用,无需司机干涉轿车就能安全经过城市穿插路途。
Ghosn对日产的主动驾驭(Autonomous Drive)技能和无人驾驭轿车(self-driving cars)作了区别。
“我想要弄清一下,日产引领的主动驾驭(Autonomous Drive)技能和无人驾驭轿车(self-driving cars)之间有很大的不同。主动驾驭是要开释或减轻司机的日常使命,特别是在拥堵或长间隔行车条件下。司机依然可以操控轿车,但这时的轿车可以主动做更多的工作。”Ghosn表明,“相较而言不要求任何人工干涉的无人驾驭间隔实践商用还有很长的间隔。现在它们只合适严厉操控的路途环境,要求速度低,并且面对着法规雷区。”






