


摘要:
跟着全球动力危机的加重,节能减排成为了开展的干流。针对动力缺少问题,从实践运用视点动身,以节能为意图,本文提出了新式的三臂式聚光盯梢体系。本规划由四象限光电传感器检测入射光,经过操控模块处理,主动调理测角设备中的电机运动,测得光角并传给反光设备,调理反光设备使反射光一直聚集在接纳器上,适用于塔式太阳能聚光发电的场合。
著作内容简介
塔式太阳能聚光发电工业开展迅猛,但因聚光功率低,操控体系杂乱,本钱高级问题至今仍未商业化。为进步聚光精度,简化操控体系,咱们规划了三臂式机械组织,选用测角设备与反光设备双盯梢体系,大大地进步了聚光发电的性价比,到达节能减排的意图。
咱们经过测角设备与太阳光笔直得到太阳光方位,并传给各反光设备。反光设备依据相应算法做出调整,使一切的反射光聚集在接纳塔,进步太阳光运用率。
立异点:
- 立异的三臂滑道式结构,结构简略、操控便利和调整精度高,下降本钱和体系功耗。
- 将测角设备和反光设备分离出来,低本钱高功率的得到太阳光的方位信号并准确的将反射光聚集在一点。
- 盯梢体系完结了将太阳光一直聚集在承受塔处,不受太阳方位改变的影响,大大进步了太阳能的运用率。
- 本体系各模块部件可独自替换,便于修理保护;依据不同运用对相应模块做调整,扩展体系设备的运用规模,如各种盯梢体系,趋光体系,导光体系,有用地完结节能减排的意图。
本体系的模型及功用已完结,后续作业是体系的测验及优化。咱们深信本体系在新动力运用,节能减排方面发挥了巨大效果,发明高社会经济效益。
1项目布景及含义
太阳能取之不尽用之不竭,并且不会发生温室气体,与其他方法的可再生动力比较如风能,太阳能是来历最为丰厚且最安稳的动力。据海外媒体报道,一份由多国研讨人员联合编撰的陈述指出,聚光太阳能发电继风能、光电池之后,现已开端锋芒毕露,有望成为处理动力匮乏、应对气候变暖的有用技能手段。选用聚光太阳能发电(CSP)技能,2050年,沙漠中的太阳能发电站将可以满意全球动力需求的25%,对CSP的出资有或许高达1740亿欧元,太阳能发电站的产能可达1.5万亿瓦,占全球电能需求的四分之一。一起还能发明200万个作业时机,每年削减21亿吨二氧化碳排放。科学家以为,坐落“阳光充足地带”的国家将从CSP技能中获益,包含美国南部的沙漠区域、非洲北部、墨西哥、我国和印度等。
塔式太阳能热发电体系首要由日光反射镜子体系、接纳器组成成,如图1-1所示。其间日光反射镜子体系由许多大型、平整的太阳盯梢反射镜构成,对太阳进行实时盯梢,把太阳光聚集到塔顶的接纳器。在接纳器中对传热流体进行加热,发生高温过热蒸汽,过热蒸汽推进惯例涡轮发电机组发电。塔式CSP电站的首要优势在于它的作业温度较高(800~1000℃),使其年度发电功率可以到达17%~20%,并且因为管路循环体系较槽式体系简略得多,进步功率和下降本钱的潜力都比较大;塔式CSP电站选用湿冷却的用水量也略少于槽式体系,若需求选用干式冷却,其对功用和运转本钱的影响也较低。塔式CSP的缺陷也是显着的:为了将阳光准确会聚到集热塔顶的接纳器上,对每一块定日镜的双轴盯梢体系都要进行独自操控,而槽式体系的单轴追寻体系在结构上和操控上都要简略得多;因为缺少大型商用事例(占在运CSP装机容量的5.1%),相对槽式体系来说,塔式CSP电站的本钱、功用、可靠性都还存在必定的不确认性;为发挥其功率潜力而需运用的融盐介质也尚存一些技能问题值得顾忌。
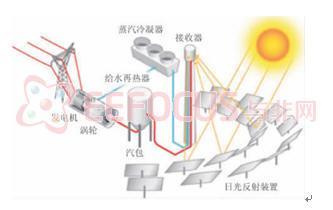
图 1‑1电力塔发电厂
为了处理现有塔式CSP存在的问题,咱们提出了运用于聚光太阳能发电的三臂式光盯梢体系。本体系不只有用的处理了盯梢体系杂乱的问题,还下降了盯梢体系的本钱,进步了盯梢体系的功用与可靠性,对塔式CSP的开展有大大的推进效果。
2项目计划
2.1体系概述
本著作运用于塔式CSP电站,处理CSP发电中的聚光操控难题。在本体系的研讨与规划中,咱们选用四象限光探测器检测太阳光,将其收集到的四路模拟信号进行AD转化,再将转化后的数字信号送到MCU中,若探测器的四个象限输出的电压值持平,阐明太阳光与测角设备笔直;不然,阐明太阳光与测角设备没有笔直,MCU发送指令给电机驱动电路,调理三臂设备使之与太阳光坚持笔直。经过电动推杆升降的时刻以及三轴加速度计的检测可以算出三根推杆的高度,然后得到太阳光的视点。测角设备的MCU经过CAN总线把太阳光角信号传给反光设备,反光设备的MCU调理三臂设备使其反射光一直聚集在承受塔上,完结聚光的功用。此外,经过接触按键,咱们对LCD进行操控,使LCD能显现体系的作业状况,其时太阳光的视点以及太阳光强度。测角设备上的EEPROM将这些数据存储起来,并将这些数据传给上位机,在上位机上可制作出当天或近几天太阳光角与太阳光强随时刻的改变曲线。此外,体系可依据环境中的光强,主动调理作业形式,当光强太弱,发电量比耗电量还大时,体系便进入休眠状况,以减小体系的功耗。整个体系中,硬件电路是体系功用得以完结的根底,软件是体系的中心,机械结构则是体系功用的执行者。依据这些要求,咱们项目首要研讨的内容有:
- 三臂式机械结构研讨
- 太阳光测角算法研讨
- 反光盯梢算法研讨
- 体系软硬件完结
2.1.1测角模块
本体系测角模块的原理如下图2-1所示。四象限光源探测器的四路输出将信号直接传给PSoC的AD,使模拟信号转化为数字信号,然后交给MCU处理,MCU将信号滤波,依据算法,生成电机驱动电路的调理指令,滚动相应的电机来调理电动推杆的高度,使端面与太阳光笔直。依据推杆的升降时刻以及三轴加速度计测得推杆的高度,然后得到太阳光光矢信息。经过CAN电路将光矢信息传给反光设备。体系设置了睡觉形式和作业形式两种形式,在光强弱的状况下就进入睡觉形式以减小体系功耗。体系选用接触按键进行人工调试,选用接触模块可使体系安稳性高,运用便利。经过LCD与LED来显现体系的作业状况,当时太阳光视点,太阳光强度等信息。经过EEPROM存储器将太阳光视点,太阳光强度等信息存储起来,供体系剖析,当地太阳光照度等状况剖析用。
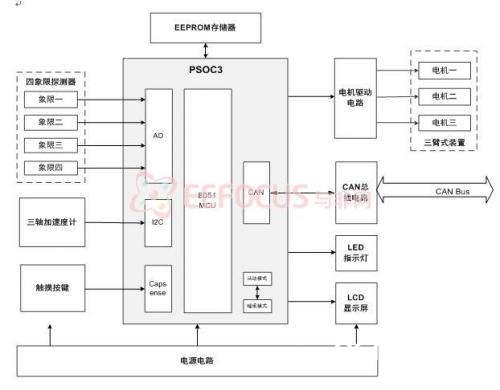
图 2‑1测角模块结构框图
测角算法:
假定从四象限探测器输出的电压别离为 v1,v2,v3,v4。咱们引进变量 x,y 别离表明在 x轴和y轴方向上的实在偏移,dx,dy别离表明在x轴和y轴方向上的偏大估量。如图 2-2所示。
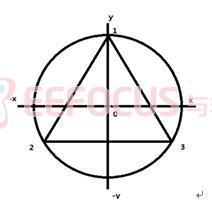
图 2‑2测角算法示意图
运用和差法,可得:
dx=(v1+v4-v2-v3)/(v1+v2+v3+v4),
dy=(v1+v2-v3-v4)/(v1+v2+v3+v4),
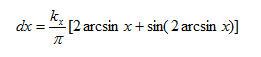
经过解四象限探测器光路数学模型得出x与dx、y与dy之间的联系式,为:
 (1)
(1)
 (2)
(2)
用MATLAB拟合可以得出x和y曲线特征值。将特征值储存在PSOC的Flash Memory中,在方针方位检测电路给出待求点dx和dy的值后,将其作为自变量,带入到已知特征值的曲线方程,得出的因变量x和y.。咱们为偏移量x,y别离设定一个阈值Mx,My。只有当偏移量超过了相应的阈值后才进行调理。L1、L2、L3别离表明三根机械手臂。经过这种算法,咱们可以坚持坐标原点O不动。x和y或许的9中状况和对应的调理方法如表2-1所示
表格2‑1 调理方法对照表
|
|
L1 |
L2 |
L3 |
|---|---|---|---|
|
y>My, x>Mx |
上升4个单位长度 |
下降5个单位长度 |
上升1个单位长度 |
|
y>My, x-Mx |
上升4个单位长度 |
上升1个单位长度 |
下降5个单位长度 |
|
y>My, -MxxMx |
上升4个单位长度 |
下降2个单位长度 |
下降2个单位长度 |
|
y-My, x>Mx |
下降4个单位长度 |
下降1个单位长度 |
上升5个单位长度 |
|
y-My, x-Mx |
下降4个单位长度 |
上升5个单位长度 |
下降1个单位长度 |
|
y-My, -MxxMx |
下降4个单位长度 |
上升2个单位长度 |
上升2个单位长度 |
|
-MyyMy, x>Mx |
坚持不变 |
下降3个单位长度 |
上升3个单位长度 |
|
-MyyMy, x-Mx |
坚持不变 |
上升3个单位长度 |
下降3个单位长度 |
|
-MyyMy,-MxxMx |
坚持不变 |
坚持不变 |
坚持不变 |
2.1.2反光模块:
本体系反光模块的体系框图如图2-3所示。反光模块经过CAN电路来接纳太阳光角信息,然后经过MCU下达的指令,操控电机驱动电路调理电机滚动,使镜子一直把光能反射到承受塔上。体系选用三轴加速度传感器检测设备的电动推杆高度,以避免电动推杆伸究竟或伸到头而损害电机;选用LED和LCD显现体系的作业状况,经过接触按键人工调控;选用睡觉形式和作业形式两种形式,来下降体系的功耗。
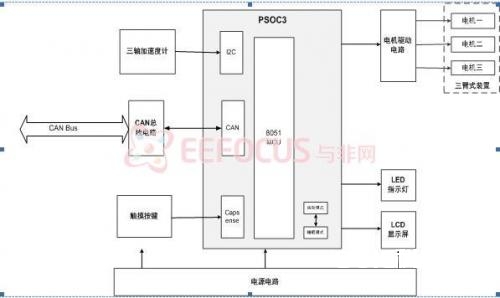
图 2‑3 测角设备结构框图
反光算法:
以接纳塔为原点树立空间直角坐标系O-XYZ,以镜场中恣意必定日镜设备为原点树立另一空间直角坐标系O’-X’Y’Z’,其间O-XYZ与O’-X’Y’Z’之间的联系如图2-4(a)所示。
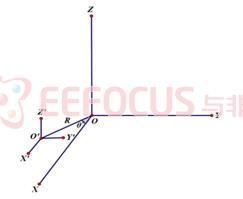
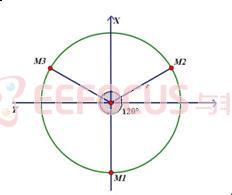
图 2‑4(a)两坐标联系示意图 图 2‑4(b)三根电机摆放示意图
假定太阳光从恣意方向入射,运用上述太阳盯梢算法使得安装了四象限探测器的三臂设备所确认的平面笔直于太阳光,此刻得出三根电机推杆的高度H1,H2,H3,再由三根电机在坐标系O-XYZ的摆放方位(如图2-4(b)所示),求出太阳光入射方向矢量
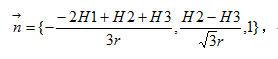 ,
,
将其归一化之后得 ,再经过坐标转化
,再经过坐标转化
得到太阳光入射方向矢量在坐标O’-X’Y’Z’的表明
 ;
;
易知接纳塔接纳点在O’-X’Y’Z’坐标为
 ,
,
其间h为定日镜面心高度,为设定参数值,然后对t归一化得{m,n,l}(其间n=0)。令 ;
;
在坐标系O’-X’Y’Z’中定日镜平面方程为
别离代入三根电机的X’Y’面坐标,即可求出三根电机的所需的绝对高度。

2.2三臂式机械结构图

图 2‑6三臂机械结构比例图
3 体系功用剖析
塔式太阳能热电体系首要由以下四个部分组成:定日镜设备,高温接纳器,蓄热设备和发电体系。定日镜担任收集太阳能,接纳器担任将收集的太阳能转化为热能,燃气轮机机组将热能终究转化为电能输出。定日镜(由平面镜,镜架和盯梢组织三部分组成)是体系最重要的两个组件之一,占体系出资最大的部分,首要触及定日镜原理研讨,平面镜聚光质量研讨,盯梢技能研讨以及全体组织规划等内容。
现有的,以及在研讨的塔式聚光体系的定日镜都是将平面镜装在镜架上,由其盯梢设备驱动镜面随时主动盯梢太阳。而咱们提出了将太阳盯梢设备和镜面反射设备分隔由两个设备完结。太阳盯梢设备(简称测角设备)和镜面反射设备(简称反射设备)的结构彻底相同,都是咱们规划的三臂式结构。本体系在以下几个最首要的问题上全面立异,走出一条经济,有用的定日镜技能开展道路。
-
盯梢技能
现有的盯梢技能大部分选用微型计算机操控,少部分选用光电传感器式操控。因为盯梢技能和反光技能在一个设备上,所以无论是选用计算机程序仍是其他盯梢传感器都是操控的入射光线,而对塔式体系而言,需求的是反射光线一直投射在塔顶的接纳器上,尽量减小光斑溢出接纳器口的时机。咱们的体系中,将定日镜设备操控的是反射光线,操控更直接,精度更高,并且本钱也大大下降。
-
不行变体系差错
双轴盯梢结构的轴线与平面镜中心交点不重合,导致设备中心不能严厉限定在一个固定的空间方位而是环绕轴线做弧线运动,设备自身有不行战胜的体系差错。与双轴盯梢体系比较,本体系的三臂结构的轴线与平面镜的中心重合,战胜了双轴盯梢体系的体系差错。不过本体系选用四象限光源探测器来测太阳光的入射视点,那么四象限的精度就会影响本体系的盯梢精度,带来体系差错。
-
支撑结构
以往大都选用立式单轴方位角调整组织,需求选用许多的水泥混凝土做根底,资料耗用和本钱十分可观,并且平面镜面积越大,变形将越严峻,抗风性以及设备的安稳性将大大下降。本体系选用三臂式结构,使设备全体的安稳性得到了大大的进步。
4项目立异点
4.1立异的三臂滑道式机械结构
盯梢设备首要分为单轴和双轴两种,单轴盯梢结构简略,功耗低,可是盯梢精度低;双轴盯梢精度高,可是本钱和功耗高。三臂滑道式机械结构可以满意一个杰出的盯梢设备结构的规划要求,即功耗低,本钱低,运动规模满意当地太阳方位改变的规模来完结全天盯梢;有盯梢方位的极限方位保护规划,有自锁功用避免意外状况;传动组织的规划应具有紧凑,易保护的特色,此外,首要的支撑结构应具有必定的强度规划,可以反抗必定的风载。
4.2双盯梢体系
用将测角设备和反光设备分离出来。测角盯梢设备不只依据电机调理时刻来得到三根机械臂的长度来得到光角,一起运用加速度传感器来纠正差错,使得体系的测角精度高。此外用一个电机既可以得到光角信息,与其他测角体系比较,本钱大大下降。盯梢设备依据准确的太阳光矢信息,以及反光盯梢算法调理反射光使之聚集于接纳器上,聚集精度好。
4.3塔式聚光发电
本体系立足于塔式聚光发电体系,经过改善塔式聚光发电的盯梢体系来完结将太阳光一直聚集在承受塔处,使得聚光发电不受太阳方位改变的影响,大大进步了太阳能的运用率。进步塔式聚光发电的性价比。
4.4体系模块化
本体系为模块化设备,各模块部件可独自替换,便于修理保护;一起,体系依据不同运用对相应模块做调整,扩展体系设备的运用规模,本体系可广泛运用于各种盯梢体系,趋光体系,导光体系,有用地完结节能减排的意图。
4.5多作业形式
本体系设置了睡觉形式和作业形式两种形式,在无光照及光照太弱使得发电量小于耗电量时,体系进入睡觉形式,大大的减小了体系的功耗。






