


1、SPI运用原理
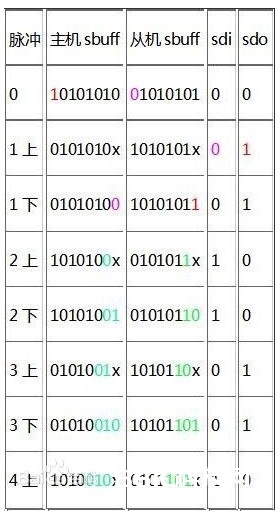
以数据交流完成数据传输,第一个跳变沿完成数据输出,第二个跳变沿完成采样。如下图
2、GPIO的装备
GPIO_InitTypeDef GPIO_InitStructure;
//装备SPI2管脚
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO|RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13 |GPIO_Pin_14| GPIO_Pin_15;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOB, &GPIO_InitStructure);
3、SPI装备
typedef struct
{
uint16_t SPI_DirecTIon;//设置方向 (2线全双工、2线只承受、一线发送、一线承受)
uint16_t SPI_Mode; //形式 (从或主设备)
uint16_t SPI_DataSize; //宽度 (8或16位)
uint16_t SPI_CPOL; //时钟极性 (低或高)
uint16_t SPI_CPHA; //时钟相位 (第一个或第二个跳变沿)
uint16_t SPI_NSS; //片选方法 (硬件或软件方法)
uint16_t SPI_BaudRatePrescaler; //波特率预分频 (从2—256分频)
uint16_t SPI_FirstBit; //最早发送的位 (最低位,仍是最高位在先)
uint16_t SPI_CRCPolynomial; //设置crc多项式 (数字)如7
}SPI_InitTypeDef;
//SPI2装备选项
RCC_APB1PeriphClockCmd(RCC_APB1Periph_SPI2 ,ENABLE);
SPI_InitStructure.SPI_DirecTIon = SPI_DirecTIon_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Master;
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_16;
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial = 7;
SPI_Init(SPI2, &SPI_InitStructure);
//使能SPI2
SPI_Cmd(SPI2, ENABLE);
4、交流数据
u8 SPI_Exchange(SPI_TypeDef* SPIx,u8 Byte)
{
while((SPIx-》SR&SPI_I2S_FLAG_TXE)==RESET); //等候发送区空
SPIx-》DR=Byte; //发送一个byte
while((SPIx-》SR&SPI_I2S_FLAG_RXNE)==RESET);//等候接收完一个byte
return SPIx-》DR; //回来收到的数据
}






