


无人驾驭的主意,由来已久,不少科幻小说中也有相关想象。当然人们没有想到的是,科技的开展如此敏捷,梦想行将变成实际,之前也提过,从谷歌、百度、特斯拉等科技公司,到宝马、奔跑、奥迪等整车厂商,再到大陆、博世、德尔福等零部件巨子,纷繁进入无人驾驭范畴。

首要简单说一下自动驾驭的原理,一切的操控体系都是由传感器、操控器和执行器组成的。
从这个角度上讲,自动驾驭原理其实和人工驾驭十分类似的,人类用眼睛调查路况,而自动驾驭则是运用激光雷达、超声波雷达、摄像头、GPS等传感器来调查路况确认方位。咱们用大脑做判别,自动驾驭当然便是用电脑作为操控器来判别。然后咱们经过四肢操控车辆方向盘、加快和刹车,自动驾驭也是依据电脑的输出直接去操控车辆。
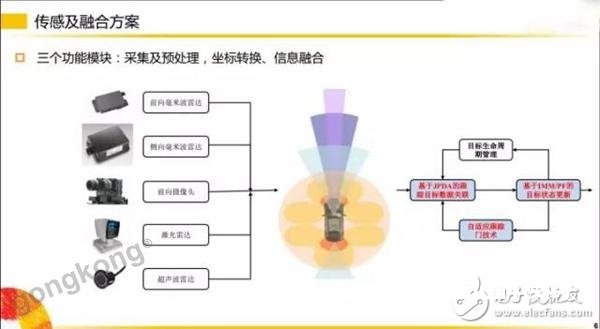
完成一个智能驾驭体系,根本会有几个层级:
感知层 → 交融层 → 规划层 → 操控层
IMU
感知层是无人驾驭是否能够完成的先决条件,为了能让无人驾驭体系有更高频率地获取定位信息,那就引进频率更高的传感器。这便是百度无人车传感器的联合主演之一——IMU(Inertial Measurement Unit)惯性丈量单元。
GPS得到的经纬度信息作为输入信号传入IMU,IMU再经过串口线与操控器相连接,以此获取更高频率的定位成果。

IMU(InerTIal Measurement Unit)学名惯性丈量单元,理论力学告知咱们,一切的运动都能够分解为一个直线运动和一个旋转运动,故这个惯性丈量单元便是丈量这两种运动,直线运动经过加快度计能够丈量,旋转运动则经过陀螺。一般的,一个IMU包含了三个单轴的加快度计和三个单轴的陀螺,加快度计检测物体在载体坐标体系独立三轴的加快度信号,而陀螺检测载体相对于导航坐标系的角速度信号,丈量物体在三维空间中的角速度和加快度,并以此解算出物体的姿势。在导航中用着很重要的运用价值。为了进步可靠性,还能够为每个轴装备更多的传感器。一般来说IMU要装置在被测物体的重心上。
激光雷达
说到无人车,就不得不说到激光雷达。它便是无人车上不断旋转的那顶帽子。它的原理类似于声呐。只不过这儿咱们用光替代声响,来衡量轿车与障碍物之间的间隔。和蝙蝠靠回声定位相同,轿车向四周发射激光束,并经过反射回来的信号制作出周围环境的3D模型。

毫米波雷达
激光雷达的遍及所遇到的最大应战是:本钱过高,独自一个雷达的价格或许就超过了一般小轿车的价格。
为了推动自动驾驭技能的开展,一起要处理摄像机测距、测速不行准确的问题。工程师们挑选了性价比更高的毫米波雷达作为测距和测速的传感器。毫米波雷达不只具有本钱适中的特色,并且能够完美处理激光雷达所处理不了的沙尘气候。

图中所示为百度Apollo 2.0中所运用的毫米波雷达——ConTInental的ARS-408,它被装置在轿车保险杠的正中间,面向轿车的前进方向。
运用在自动驾驭范畴的毫米波雷达主要有3个频段,分别是24GHz,77GHz和79GHz。不同频段的毫米波雷达有着不同的效果啊。
24GHz处在该频段上的雷达的检测间隔有限,因而常用于检测近处的障碍物(车辆),能够完成的ADAS功用有盲点检测、变道辅佐等;频段在77GHz左右的雷达,最大检测间隔能够到达160米以上。
当然无人车的感知层树立是一个十分复杂的进程,需求好几层不同感知体系,然后确保正确地辨认周围环境。除了文中说到的IMU、激光雷达、毫米波雷达外,还有已被广泛运用的超声波雷达、摄像头、GPS等传感器。
能否正确感知周围地环境,这是无人车完成的必要先决条件。咱们等待无人驾驭给咱们演出的奇幻大片。
责任编辑;zl






