


激光雷达作为许多智能设备的中心传感器,其运用现已十分广泛。现在咱们能够在无人驾驶小车、服务机器人、AGV叉车、智能路政交通以及自动化出产线上一再看到激光雷达的身影,也足以阐明它在人工智能产业链上不可或缺的方位。
就现在市面上的干流激光雷达产品而言,用于环境勘探和地图构建的雷达,按技能道路大体能够分为两类,一类是TOF(Time of Flight,时刻飞翔法)雷达,另一类是三角测距法雷达。这两个名词信任许多人并不生疏,可是要说这两种计划从原理、功能到本钱、运用上究竟孰优孰劣,以及背面的原因是什么,或许每个人都还或多或少有所疑问。今日小编就抛砖引玉,就这些问题做一次解析。
一、原理
三角法的原理如下图所示,激光器发射激光,在照射到物体后,反射光由线性CCD接纳,由于激光器和勘探器间隔了一段间隔,所以依照光学途径,不同间隔的物体将会成像在CCD上不同的方位。依照三角公式进行核算,就能推导出被测物体的间隔。
光看原理,是不是觉得挺简略。

图1 三角法测距原理
可是TOF的原理愈加简略。如图2所示,激光器发射一个激光脉冲,并由计时器记载下出射的时刻,回返光经接纳器接纳,并由计时器记载下回返的时刻。两个时刻相减即得到了光的“飞翔时刻”,而光速是必定的,因而在已知速度和时刻后很简略就能够核算出间隔。
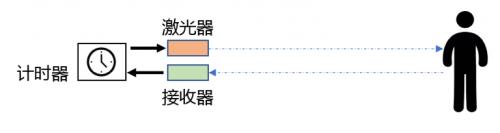
图2 TOF测距原理
惋惜的是,要是一切作业做起来都好像想起来相同简略,那国际就太美好了。这两种计划在详细完结时都会有各自的应战,可是比较起来,TOF要霸占的难关明显要多得多。
TOF雷达的完结难点首要在于:
1.首先是计时问题。在TOF计划中,间隔丈量依靠于时刻的丈量。可是光速太快了,因而要取得准确的间隔,对计时体系的要求也就变得很高。一个数据是,激光雷达要丈量1cm的间隔,对应的时刻跨度约为65ps。略微了解电气特性的同学应该就知道这背面对电路体系意味着什么。
2.其次是脉冲信号的处理。这儿边又分两个部分:
a)一个是激光的:三角雷达里对激光器驱动简直没什么要求,由于丈量依靠的激光回波的方位,所以只需求一个接连光出射就能够了。可是TOF却不可,不光要脉冲激光,而且质量还不能太差,现在TOF雷达的出射光脉宽都在几纳秒左右,上升沿更是要求越快越好,因而每家产品的激光驱动计划也是有凹凸之分的。
b)另一个是接纳器的。一般来说回波时刻辨别其实是对上升沿的时刻辨别,因而在对回波信号处理时,有必要确保信号尽量不要失真。别的,即使信号没有失真,由于回波信号不或许是一个抱负的方波,因而在同一间隔下对不同物体的丈量也会导致前沿的变化。比方对同一方位的白纸和黑纸的丈量,或许得到如下图的两个回波信号,而时刻丈量体系有必要测出这两个前沿是同一时刻的(由于间隔是同一间隔),这就需求特别的处理。
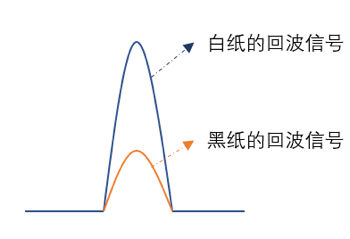
图3 不同反射率的回波信号差异
除此以外,接纳端还面临着信号饱满、底噪处理等等问题,能够说困难重重。
二、功能PK,知其然可知其所以然?
说了这么多,其实从下流用户的视点,并不关怀你完结起来简略仍是难。用户最关怀的不外乎两点:功能和价格。先说功能,假如了解这个职业的人大多知道,TOF雷达从功能上是优于三角雷达的。可是详细体现在哪些方面,背面的原因又是什么呢?
1.丈量间隔
从原理上来说,TOF雷达能够丈量的间隔更远。实际上,在一些要求丈量间隔的场合,比方无人驾驶轿车运用,简直都是TOF雷达。三角雷达测不远,首要有几个方面的原因:一是原理上的约束,其实仔细观察图1不难发现,三角雷达丈量的物体间隔越远,在CCD上的方位不同就越小,以致于在超越某个间隔后,CCD简直无法分辩。二是三角雷达没办法像TOF雷达那样取得较高的信噪比。TOF选用脉冲激光采样,而且还能严格控制视场以削减环境光的影响。这些都是长间隔丈量的前提条件。
当然,间隔长短并不代表肯定的好坏,这取决于详细的运用场景。
2.采样率
激光雷达描绘环境时,输出的是点云图画。每秒能够完结的点云丈量次数,便是采样率。在转速必定的情况下,采样率决议了每一帧图画的点云数目以及点云的角分辩率。角分辩率越高,点云数量越多,则图画对周围环境的描绘就越详尽。
就市面上的产品而言,三角法雷达的采样率一般都在20k以下,TOF雷达则能做到更高(例如星秒的TOF雷达PAVO最高能够到达100k的采样率)。究其原因,TOF完结一次丈量只需求一个光脉冲,实时时刻剖析也能很快呼应。可是三角雷达需求的运算进程耗时则更长。
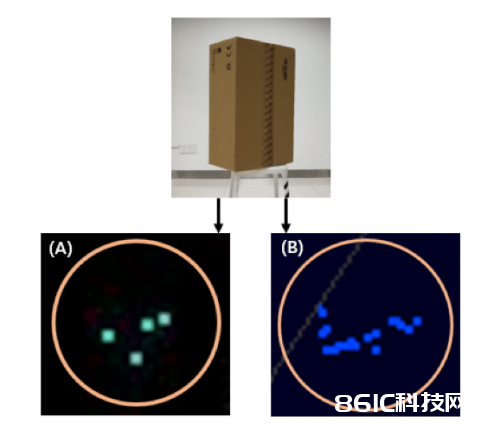
图4 对同一方位物体,不同采样率的成像作用
(A):低采样率点云图样;(B):高采样率点云图样(PAVO)
3.精度
激光雷达实质上是个测距设备,因而间隔的丈量精度是毫无疑问的中心目标。在这一点上,三角法在近间隔下的精度很高,可是跟着间隔越来越远,其丈量的精度会越来越差,这是由于三角法的丈量和视点有关,而跟着间隔添加,视点差异会越来越小。所以三角雷达在标示精度时往往都是选用百分比的标示(常见的如1%),那么在20m的间隔时最大差错就在20cm。而TOF雷达是依靠飞翔时刻,时刻丈量精度并不跟着长度添加有明显变化,因而大多数TOF雷达在几十米的丈量规模内都能坚持几个厘米的精度。
2.转速(帧率)
在机械式雷达中,图画帧率便是由电机的转速决议的。就现在市面上的二维激光雷达而言,三角雷达的最高转速一般在20Hz以下,TOF雷达则能够做到30Hz-50Hz左右。一般三角雷达一般选用选用上下分体的结构,即上面转的部分担任激光发射、接纳和收集,下部分担任电机驱动和供电等,过重的运动组件约束了更高的转速。而TOF雷达一般选用一体化的半固态结构,电机仅需带动反射镜,因而电机的功耗很小,而且能够支撑的转速也更高。
当然,这儿说到的转速的差异仅仅对现有产品的一个客观剖析。其实转速和雷达选用TOF仍是三角法没有实质的联络,干流的多线TOF雷达也都是选用的上下分体的结构,究竟同轴结构的光学规划遭到许多约束。多线TOF雷达的转速一般也都在20Hz以下。
不过,高转速(或许说高帧率)对点云成像作用是很有含义的。高帧率更利于捕捉高速运动的物体,比方高速公路上行进的车辆。此外,在本身建图时,运动中的雷达建图会产生畸变(举个比方,假如一个停止的雷达扫描一圈是一个圆,那么当雷达直线运动时,扫描出的图画就变成一个椭圆)。明显,高转速能够更好的削减这种畸变的影响。
三、本钱
假如只看功能比较,好像TOF雷达的功能彻底压过三角雷达。不过产品的竞赛并不仅仅是功能参数的比拼,用户在乎的还有价格、稳定性和服务等等。
至少在本钱方面,现在三角雷达的本钱是低于TOF雷达的,近间隔的三角雷达本钱现已在百元等级。而现在进口TOF雷达的价格动辄就要万元以上。能够说,昂扬的价格是约束TOF激光雷达运用进一步拓宽的重要因素。
不过,跟着近年来国内TOF雷达厂商的兴起,TOF雷达的本钱现已得到大幅的下降,国产TOF雷达产品的价格比较于进口品牌,现已有相当大的竞赛力。未来,跟着出产工艺的完善和出货量的进一步提高,信任TOF雷达的本钱还会进一步紧缩,降到和三角雷达附近的水平也不是没有或许。
四、运用场景
三角雷达的场景首要是在室内短间隔的运用,最典型的场景便是扫地机器人。而在勘探规模较大场景(比方商场、机场或许车站),以及室外场景,TOF的运用则更为广泛。别的值得一提的是,三角雷达这种暴露在外滚动的计划,使其产品在防尘防水方面十分软弱,在一些特别场景的运用,比方AVG小车作业的车间常常会有许多尘埃,在这种环境下,三角雷达的电机十分简略损坏。比较之下,TOF雷达选用的半固态规划,能够有更优异的防护作用,作业寿数也更长。






