


变频马达首要依托半导体元件组成的电子电路来驱动马达作业,其间MCU数位操控技能的良寙攸关着马达功率是否抱负;而在MCU操控技能日趋老练,加上FOC演算法助力之下,变频马达功率将逐渐跃进。
马达是家电产品中,不可或缺的动力元件,马达的运用量,也是日子舒适程度的目标之一。家电产品中,常见的马达根本上有三种:沟通感应马达(AC Induction Motor, ACIM)、直流有刷马达(Brushed DC Motor)、直流无刷马达(BLDC/PMSM)(亦称变频马达)。事实上,马达的分类办法可从以下几点区别。
.电源
从电源的运用上来看,可简易分红沟通马达与直流马达两大类。
.操控办法
从马达操控上来看,可以简易分红同步操控与非同步操控(感应操控)两大类。BLDC/PMSM马达选用同步操控办法,系运用定子上的电流操控来同步操控马达转子的旋转。ACIM马达选用的是感应操控办法,系运用定子的电流环的操控,感应带动转子,转子磁场环与定子磁场环因而存在速度差。
.定子绕线组数
最常见的有三相马达与单相马达,其间三相绕组还有分红Y结线与星型结线两种。
.电刷
从电刷有无来看,可以简易分红有刷马达与无刷马达两大类。有刷马达将直流电供给绕组的组织为电刷与整流子(固定在定子上的便是电刷,固定在转子上的便是整流子),无刷马达则是选用电子电路来替代电刷与整流子。
家电产品加快导入 高功率节能马达商机起飞
驱动直流马达在家电产品的运用风潮的主因有以下几点。
.动力危机
根据世界动力总署(IEA)资料显现,马达是耗电量最大的运用,约占全球电力耗费46%以上,因而也成为业界执行节能减碳的首要改进要点,其间直流马达在高功率节能上的体现,优于传统的ACIM。直流马达的运用,已渐成家电产品动力元件的趋势。
据估计,从IE1晋级到IE3,省电功率可进步8%。马达最低能效规范(MEPS)方针施行,现在是在宣导期,未来一旦进入强制期,将掀起一波马达汰旧换新风潮,并影响马达制造商与半导体厂,加快推出更高功率的新计划。
.电源技能进步
三个要害的电源技能–锂电池元件、开关电源供给(Switching Power Supply)技能以及太阳能板电源技能的选用,让家电产品产品与举动电源结合成为新的安全家居与休闲概念产品。例如近年来在日本大为盛行的充电式电扇,标榜为安全家电,其停电可运用电池,有电时运用转接头(Adaptor)透过市电供电。别的欧洲人喜爱旅行,充电式电扇可随身携带,露营时没有市电插,也可以有电电扇吹。充电式电扇除了可结合太阳能板充电,也可以运用轿车DC12伏特(V)充电,运用适当便利。
.数位操控IC技能老练
现在微操控器(MCU)价格大幅下降,以投合家电产品规划加量不加价的规划需求。此外,数位脉宽调变(PWM)操控技能老练,可用同一颗IC做到方波或弦波操控,让马达制造商与半导体业者在厂物料控管上更为便利。
.DC马达元件优势
在相同功率下,DC马达功率转化功率比传统的ACIM还要好。此外,家电产品因应本钱下降,常须运用塑胶资料,而塑胶资料十分怕过热,例如养生的果菜汁机、食物搅拌机等。DC马达相较AC马达不易发烫,因而更具优势。
另一方面,在相同功率下,DC马达扭力也较ACIM强。近年来家电组织规划着重漂亮,有小型化规划趋势,因而DC马达较ACIM更合适用于体积小但要求大扭力的家电马达产品,例如电动起子、饮水机用水泵、医疗用气泵等。
.家电新趋势
居家日子品质的进步已成为全球趋势,DC马达的静音诉求与无级调速功用很多运用在新家电产品功用规划上,例如DC落地扇、吊扇、空调产品等。
驱动高功率BLDC MCU要害规划有门道
BLDC马达操控首要是选用同步操控办法,更准确地说,BLDC是一种双回授操控办法。由MCU操控定子电流方向,主导转子下一步的方位,转子方位回授,转子方位回授分红有感测器(Hall或是Encoder)与无感测器(Sensorless)两种办法,别的,电流回授首要意图在于过电流维护用。整个BLDC计划体系方块图如图1;从图中,可以简易看出决议马达产品功率的要害元件。
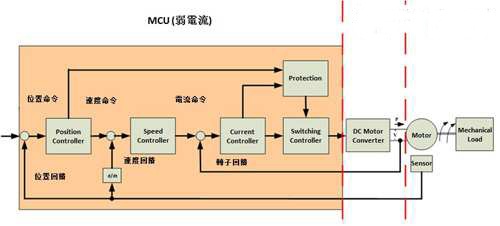
图1 BLDC体系装备方块图
.Power电路
首要分红市电运用与DC电源运用两种,首要规划考量为功率转化功率。
.MOS元件
首要为Rds标准,考量要点在于金属氧化物半导体场效电晶体(MOSFET)发热损耗。
.Gate Driver驱动电路
首要有两种–三级管电路与闸极驱动器(Gate Driver) %&&&&&%;考量要点在于Gate Driver Rising/Falling Timing所形成的开关元件损耗。
.MCU
根据产品计划需求,可选择以方波或是弦波操控,调配马达回授操控感测器计划与无感测器计划,可以分红四种计划:方波Hall计划、方波Sensorless计划、弦波Hall计划与弦波Sensorless计划。
.马达资料
首要考量铜损、铁损等马达资料特性所形成的功率损耗。
MCU马达操控内部规划首要分红五大部分(图2),以下列点阐明。

图2 PWM Edge-aligned Mode与Center-aligned Mode电路
.PWM调制电路
首要有Edge-aligned Mode与Center-aligned Mode两种形式。
.马达定子电流操控电路
调配Hall Sensor Decoder与Mask电路装备决议方波操控与弦波操控办法。
.马达驱动电路操控
首要设定MOS死区时刻(Dead-time)、外部Gate Driver电路驱动极性、防呆电路等操控办法。
.马达转子侦测电路
运用专属的Timer观测转子方位改变,侦测转子转速与堵转与否。
.马达维护电路
首要有马达驱动过电流维护电路与马达堵转维护电路两种形式。
此外,马达操控办法根本上选用的是操控体系常用的PID操控办法(图3),以速度环PID操控为例,其运作过程如下。

图3 马达PID操控要素
1.从人机介面获得控速指令,例如VR=0.5V代表机械转速500rpm
2.决议马达定子电流操控办法,例如以方波操控或者是弦波操控。
3.选用Hall或者是Sensorless办法监控马达转子方位并监控转子转速。
4.MCU核算马达是否抵达转速要求,运用PWM机制做转速调整。
要特别注意的是,高功率马达操控很注重换相点与定子电流的换相方位,根据马达特性不同转速,对换相点的补偿可能会有所不同,需要依产品需求来做换相点操控的补偿与调整,因而可以轻易地从马达的DC Bus电流平稳度,看出马达操控是否可靠。
FOC演算法助力 PMSM操控功率晋级
针对PMSM(反电动势是弦波),高效节能马达操控办法选用磁场定向操控(Field Oriented Control, FOC)办法操控,调配这种弦波电流办法操控,可以到达最高功率,首要运用于空调类压缩机与大功率马达运用,例如跑步机、电动摩托车等。
FOC计划体系架构图如图4,A线的右边可以说是用定子的视点来看体系改变,而A线的左面便是以转子的视点来看体系改变。
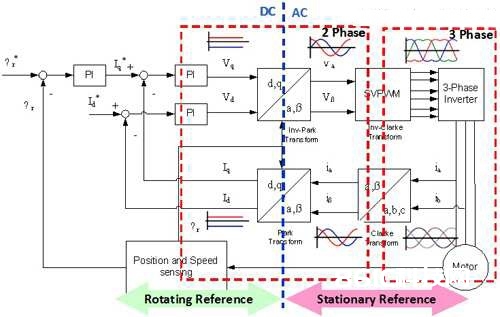
图4 FOC演算架构图
FOC是用向量来替代定子电流做操控,一般又称为向量操控(Vector Control),其运算原理首要是将马达的三相电流的三维座标轴,转化成二维座标轴(d和q座标轴)上。
FOC系选用数学办法来完成三相马达的力矩和励磁的解耦操控,因而定子电流可以被当作励磁电流Id(发生励磁)或交轴电流Iq(操控电磁力矩,类似于DC马达的电枢电流)
FOC演算法长处在于可在最佳的扭力之下作业,当负载改变时,速度回应快速而准确,让马达的暂态功率得到优化,且在动态反响中,可以到达十分精准的可变速度之操控。
FOC计划规划亦可分红有FOC-Hall与FOC-Sensorless两种办法(图5)。

图5 FOC-Hall与FOC-Sensor-less电路架构图
.FOC Hall
运用Hall信号做转子方位侦测,可精准侦测马达转子方位
.FOC Sensorless
透过两路类比数位转化器(ADC)侦测电流,通过MCU转化核算获得马达转子方位。
要特别注意的是,要做到精准的Ia/Ib电流检测,除ADC转化速度的标准,一般需要求到1Mbit/s的采样速率之外,包括印刷电路板(PCB)规划与外部滤波电路的调配,再加上MCU演算法的了解,环环相扣,都是适当重要的。






