


在《嵌入式编程之单片机的根本构成、作业原理》中,咱们解说了单片机的基础知识。本文让咱们来学习单片机有必要具有的硬件电路(外围功用电路)。这样,下一次就能够将应战一个实践单片机的运转了!
“动力”―电源电路
上期咱们学习了单片机的根本构成和作业原理。想必咱们对单片机的作业原理已经有了大致的了解。这次咱们将举例阐明单片机作业所有必要的硬件电路(外围功用电路)。
咱们将以瑞萨电子的新一代产品,通用型单片机“RL78族(RL78/G14)”为例进行阐明。
与迄今为止所学的各种电路相同,单片机的作业也需求电源。因而,单片机的外部都衔接有象电池等电源部分。
请看图1,是“RL78族(RL78/G14)”的引脚装备,该产品有64个引脚。电源有2个引脚是13/14号 (VSS/EVSS0)和15/16号 (VDD/EVDD0),
13号引脚(VSS)和14号引脚 (EVSS0)衔接GND
15号引脚VDD和16号引脚 (EVDD0)衔接电源正极
参看“RL78族(RL78/G14)”数据手册(或硬件手册),您会发现“电源电圧VDD = 1.6~5.5 V”。这是指当电源电压处于1.6V到5.5V之间时,能够确保单片机的正常作业。这个电压规模称为作业电源电压。在有些单片机数据手册上把这个规模称为引荐作业电压规模。
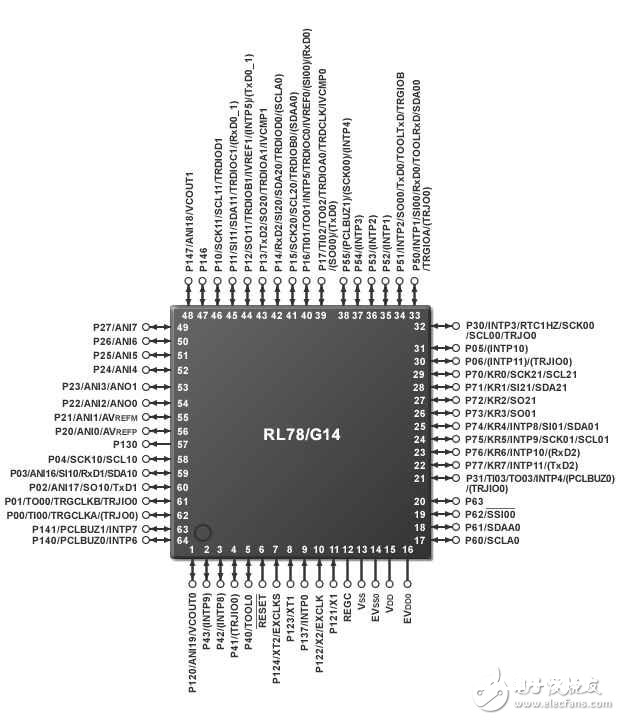
图1:“RL78族(RL78/G14)”(64引脚)的引脚衔接图
图2是 “RL78族(RL78/G14)”的电源引脚衔接的一个比如。
与15号引脚衔接的C1称为旁路电容。能够避免因瞬间大电流引起的电源电压下降,而导致的单片机的误动作。一般挑选0.01μF~0.1μF的陶瓷电容作为旁路电容。
“RL78/G14”的内部电路作业电圧是经过内部电压调理器调理电源电压得到的,内部电路的作业电压是1.8或2.1V。为了确保内部电压调理器的安稳性,在12号引脚上也衔接了电容C2。
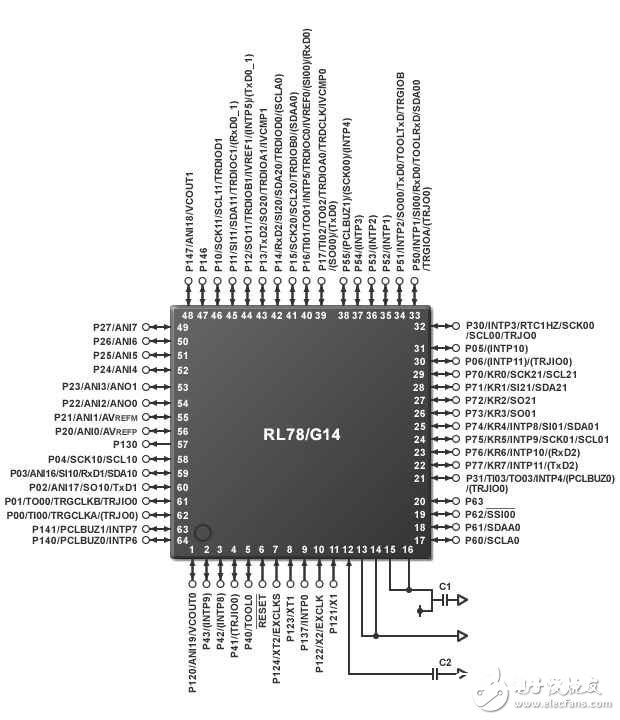
图2:“RL78族(RL78/G14)”(64引脚)的电源电路衔接实例
“总指挥”―振荡电路
正如数字电路入门③中所讲的那样,时序电路是按时钟信号(CK)的上升沿(信号从L→H的改变)或下降沿(信号从H→L的改变)同步作业的。单片机是由时序电路构成的,所以,要在外部衔接一个振荡电路供给时钟信号。象这样从单片机的外部输入的时钟信号称为“外部时钟信号”。
图3是单片机(RL78/G14)连续一个振荡电路的比如。晶体振荡器被衔接在X1和X2之间。
从图上能够看出一个外部时钟信号能够驱动单片机内部中的2个时钟振荡器。
主时钟振荡器首要用作CPU的作业时钟
子时钟振荡器首要用作外围电路和实时时钟的作业时钟
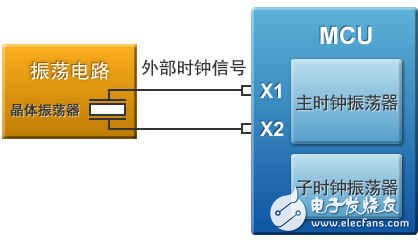
图3:振荡电路的效果
在内部外围功用非常强壮的“RL78族(RL78/G14)”上内部有频率误差仅为1%的高精度振荡电路。因而,无需从外部供给时钟信号。这种单片机上内部的时钟发生电路称为“内部振荡器”。由于不需求外部振荡电路,减少了规划工序,降低了本钱。
相似这样只需备有“内部振荡器”,咱们或许以为就能够“无需从外部供给时钟信号”。但实践上在电子手表中,一般运用频率简直不随温度而改变的、愈加准确的晶体振荡器。
「闹钟」―复位电路
刚刚接通电源的单片机内部处于不安稳的状况,CPU无法正常作业。因而,就需求进行单片机状况初始化,这就叫做复位。单片机带有复位信号输入引脚,能够将这个信号调至低电平状况后让单片机复位。也就是说经过输入复位信号来完全叫醒单片机进入作业状况。
接下来解说一下复位的时序(图4)。只需在向单片机供给安稳的时钟信号和电源的状况下才干完成复位,一起需将复位信号调至低电平。为了完成这种状况,需求将比较电源上电稍迟一步上电的电路与复位输入引脚相衔接。这种电路在电源上电后经过电阻电流渐渐流向电容,电压慢慢上升。因而,电源上电后经过一段时刻能够构成免除复位的电 路。这种外部电路称为“上电复位电路”。

图4:简易复位电路及其波形
如上图4所示,上电复位电路左边的电路称为“手动按钮复位电路”。这是经过手动按下按钮后让单片机进入初始化状况的电路。
一般单片机上复位信号有必要在必定时刻内坚持低电平。详细时刻记载在硬件手册和数据手册上。有必要依据这个时刻的长短来确认电阻R和%&&&&&%C。
而“RL78族(RL78/G14)”选用的是内部型上电复位电路。因而,只需供给超越作业电压的电源,就能够叫醒单片机进入作业状况。真是太方便了!
CPU的复位操作
经过复位操作,能够使程序计数器PC回到初始值,PC中保存的是CPU即将履行的指令地址。程序计数器PC的初始值是应用程序的头地址。单片机开端运转应用程序的方法有“固定地址开端方法”和“向量方法”。在规划单片机时,决议要运用的方法。
固定地址开端方法是指从固定地址开端履行指令的方法。不同的单片机详细的地址也有所区别。假如固定地址是0,那么,就从0地址开端履行程序。
向量方法是指从ROM的固定地址中,读取要履行指令的地址信息。这种ROM上的固定地址称为复位向量。操作过程是先取读复位向量的地址,然后再将该地址存入程序计数器PC。这种看起来比较繁琐,可是却具有能够自在更改初始履行指令地址的长处。






