


1.前语
永磁同步电动机(PMSM)因其高功率密度、高转矩和免修理等原因,广泛运用于高效驱动范畴。六相永磁同步电动机开展了三相永磁同步电动机的结构,多运用于船只电动推动等范畴,它相关于一般永磁同步电动机而言有许多优势,如船只推动体系中,电流谐波最低次数要比一般三相电机高,下降了谐波幅值,进步了体系稳定性,减小转矩脉动,进步了电机工作效率,一起减小了转子谐波损耗,别的一旦产生缺持平毛病,体系依然能够持续运转。
跟着电力电子技能的开展,电机变频调速体系在各种范畴迅速开展和运用。直接转矩操控战略是在矢量操控战略之后最新鼓起的变频调速技能,具有结构简略,动态呼应快,鲁棒性强等长处。该技能最早是二十世纪80年代由德国教授Depenbrock和日本学者Takahashi别离提出的。首要运用于感应电机操控体系。于90年代末由L Zhong、M.F.Rahman和Y.W.Hu等人将其运用到永磁同步电机操控中。
本计划中所介绍的这种六相永磁同步电机具有六相不对称的结构,是一种船只推动用电机。在Simulink中没有对应的模型。文章对六相电机模型进行剖析一起进行了树立数学模型,并用Simulink对电机进行建模并封装。本文运用Simulink对不对称六相永磁同步电机直接转矩操控体系规划和仿真。一起对直接转矩操控体系进行建模,完结整个体系的建立,一起参加空间电压矢量操控进步体系稳态转矩和电流,下降转矩脉动,而且对仿真成果进行了简略剖析。
2.不对称六相永磁同步电机的数学模型
六相PMSM数学模型与$三相电动机很类似,为使剖析便利,假定:①不考虑铁心饱满效应;②涡流和磁滞损耗忽略不计;③转子不设阻尼绕组;④以为每相绕组彻底对称,定子电流、转子磁场对称散布;⑤近似以为反电动势波形为正弦。
坐标改换。
在PMSM瞬态运转进程中,对电机运转状况方程的求解和电机动态剖析适当困难,首要原因是电机转子在磁、电结构上不对称,以及电机的电磁参数(电压、电流、磁链、转矩)的微分方法具有多种表达方法。因此在此选用坐标改换,经过消除时变参数,将变系数转化为常系数来求解,从而简化运算和剖析进程。
本文选用两相旋转坐标系(dd-qq坐标系)来对PMSM电机的稳态功用进行剖析,一起也能够对其瞬态功用进行剖析。本文所选用的坐标系与定子磁场坚持同步状况,dd轴滞后qq轴90°,dd轴的取向与转子总磁链的方向共同,成为转子磁场坐标系,A、B、C、D、E、F坐标体系与dd-qq坐标系的联系如下为六相停止坐标系到两相旋转坐标系的改换矩阵能够表明为式(1):
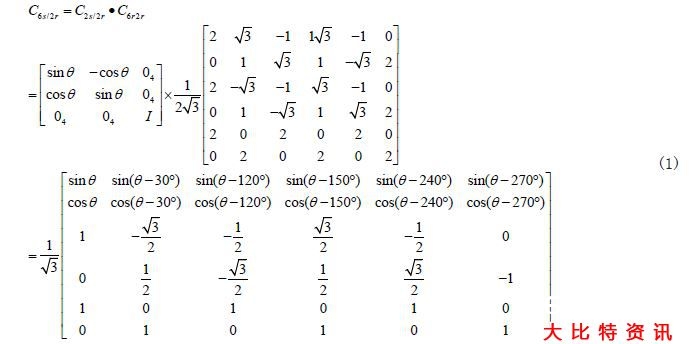
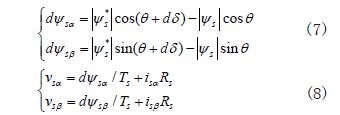
经过坐标改换可得,d-q坐标系下六相PMSM定子侧的电压方程、一起六相永磁同步电动机的磁链方程和转矩方程如式(2)-式(6)。

其间:Ud、Uq为d、q定子的电压重量;id、iq为d、q轴定子的电流重量; d ψ 、q ψ 、为d、q轴定子磁链重量;Ld、Lq为d、q轴电感重量;R为定子电阻;np为极对数; sω 为同步角速度;f ψ 为永磁体磁链;p为微分算子d/dt.
经过6/2改换,极大的简化了两相旋转坐标系下的六相PMSM的数学模型,下降了微分方程阶数,d轴磁链d ψ 和q轴磁链q ψ 不再是视点θ 的函数,这为$六相永磁同步电机的高功用转矩操控打下了坚实的根底。
在仿真进程中因为Simulink中没有现成的六相永磁同步电机模型,所以依据数学模型式(1)~(6)树立了六相永磁同步电机电机模型并对其进行了封装封装。
3.不对称六相永磁同步电机的直接转矩操控体系构成
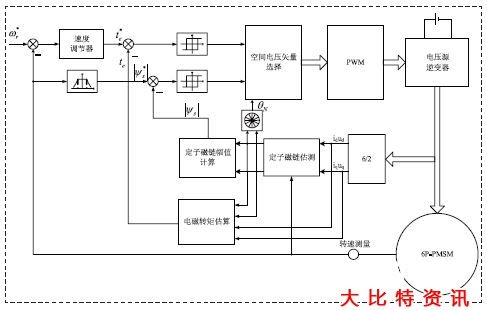
关于永磁同步电机的直接转矩操控,其首要思维是在确保定子磁链幅值稳定的前提下,依据电机的负载角δ 和电磁转矩的正比联系,经过操控定子磁链的旋转方历来操控负载角δ从而操控电机的电磁转矩。δ 是定子磁链与转子磁链矢量相关于A轴的空间电视点的空间相位差。不对称六相永磁同步电机直接转矩操控体系组成结构如图1所示,体系包含:$电动机模块、逆变器模块、坐标改换模块、定子磁链观测模型、转矩估测模型、磁链和转矩的滞环比较器模块,定子磁链分区表、以及电压空间矢量表。
经过公式(6)可知,改动相应的定子电压矢量以操控定子磁链的旋转方向从而调理负载角δ 的巨细,终究能够得到所需求的电机电磁转矩。
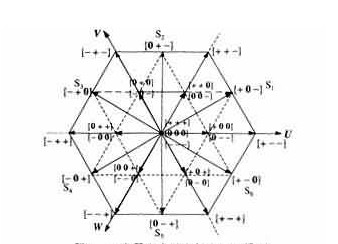
依据SVPWM不对称六相永磁同步电机直接转矩操控体系中不同磁链矢量之间的联系如图2.经过剖析对不对称六相永磁同步电机的磁链矢量与电压矢量之间的联系,终究得到参阅的电压矢量的计算公式。
定子磁链的估测选用U-I模型,经过检测出定子电压、电流计算出定子磁链。一起依据定子电流和定子磁链,能够估测出电磁转矩。
磁链滞环模块所示,它是用来操控定子磁链幅值,使电动机容量得到充沛的使用。
磁链滞环模块选用两点式调理,输入量为磁链给定值*s ψ 和磁链幅值的观测值s ψ ,输出量为磁链开关量Δψ ,其值为0或许1.转矩滞环模块的结构图,它的使命是完成对转矩的直接操控,转矩滞环模块为三种输出开关量,输入量为转矩给定值*e t 和转矩估测值f t ,输出量为转矩的开关量ΔT,其值为±1和0.
不对称六相PMSM-DTC优选空间电压矢量的构建和开关表的确认:
依据不同的导通形式,$六相电机变频器输出有64种空间电压矢量组合,包含16个零电压矢量以及如图2所示的48种电压矢量,能够看作是四个同心正12边形。本文选取了最外环的十二个电压矢量(即为:v9、v11、v27、v37、v45、v41、v26、v18、v22、v54、v52、v56)能够获得的调速功用,以及更快的转矩呼应和磁链改变。本文选用最外环的十二个电压矢量角分线作为分区鸿沟的分区方法。
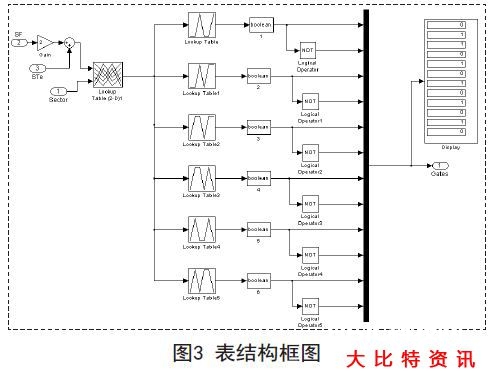
使用Simulink的查表模块完成开关表规划及查表功用,完成电压开关矢量的操控信号的输出器仿真模块的结构框图如图3所示。
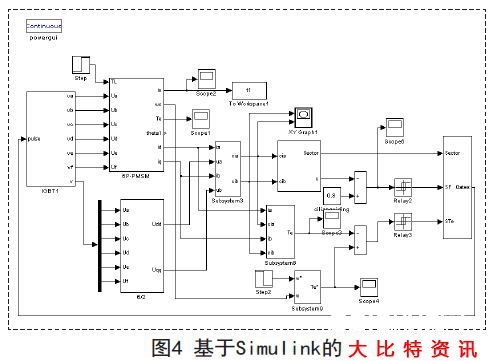
依据不对称六相永磁同步电动机直接转矩操控体系的原理,在Matlab2012a境下使用Simulink仿真东西,建立依据不对称六相永磁同步电动机直接转矩操控体系的仿真模型,全体规划框图如图4所示。
4.仿真验证
PMSM参数设定:定子电阻2.875 s R = Ω ,d – q 轴等效电感0.0085H d q L = L = ,转子磁链图5中(a)、(b)、(c)别离为该体系空载发动、0.2s时突加负载20N·m的转速、相电流、转矩仿真波形。图5(d)为负载的定子磁链轨道。
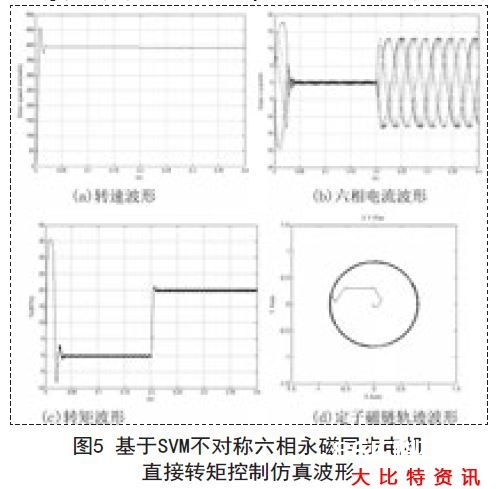
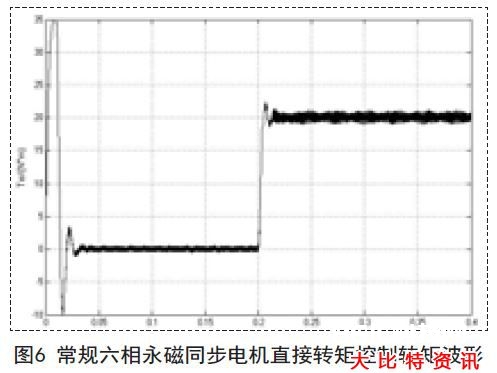
图6为惯例六相永磁同步电机直接转矩操控体系空载发动的转矩试验波形。能够看出,因为将SVM引进六相永磁同步电机的直接转矩操控中,使得稳态转矩和稳态电流得到了彻底的改进。
为了彻底补偿体系转矩和定子磁链差错,将SVM引进不对称六相永磁同步电机的直接转矩操控中,用以添加电压矢量的数量,在改进稳态功用的一起,也使得逆变器的开关频率变为近似稳定。仿真成果显现,在$直接转矩操控计划下,该永磁同步电动机驱动体系具有结构简略,稳定性,快速盯梢的功用长处。SVPWM答应逆变器在过调制区域运转。
5.定论
本文给出了依据SVM不对称$六相永磁电机操控体系规划计划。计划依据不对称六相永磁同步电动机直接转矩操控体系框图,并使用Matlab的Simulink全面完结了对依据直接转矩操控的不对称六相永磁同步电机操控体系的规划。从磁链方程和转矩方程,能够证明不对称六相永磁同步电机直接转矩操控的根本原理与三相永磁同步电机是根本共同的,依据直接转矩操控的根本原理对不对称六相永磁同步电机直接转矩操控进行了具体的建模。与传统的体系比较,该操控战略考虑逆变器作为一个独自的单元,大大下降了体系复杂性。仿真成果最终得出DTC-SVPWM技能具有共同的PMSM驱动的杰出的动态特性。定子磁链轨道趋近磁链圆,具有快速的转矩呼应。






