


L298是SGS公司的产品,L298N为15个管角的单块集成电路,高电压,高电流,四通道驱动,规划用L298N来接纳DTL或许TTL逻辑电平,驱动理性负载(比方继电器,直流和步进马达)和开关电源晶体管。内部包括4通道逻辑驱动电路,其额外作业电流为
1,L298内部的原理图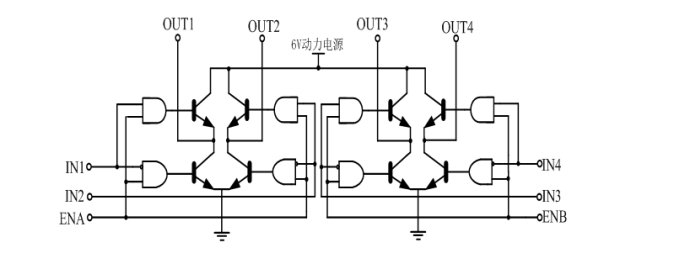
2,L298
3,L298的逻辑功用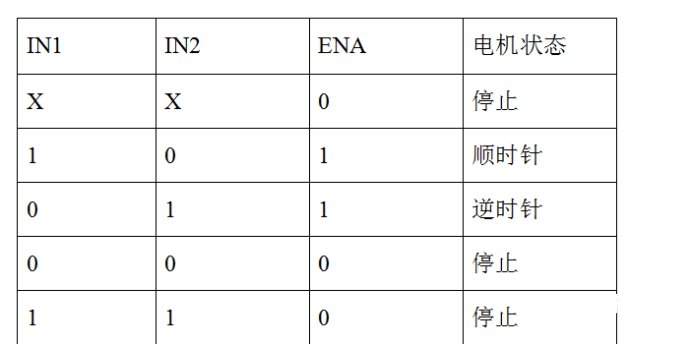
当使能端为高电平时,输入端IN1为PWM信号,IN2为低电平信号时,电机正转;输入端IN1为低电平信号,IN2为PWM信号时,电机回转;;IN1与IN2相
在对直流电动机电压的操控和驱动中,半导体功率器材(L298)在使用上能够分为两种方法:线性扩大驱动方法和开关驱动方法在线性扩大驱动方法。
半导体功率器材作业在线性区长处是操控原理简略,输出动摇小,线性好,对附近电路搅扰小,缺陷为功率器材作业在线性区,功率低和散热问题严峻。开关驱动方法是使半导体功率器材作业在开关状况,经过脉调制(PWM)来操控电动机的电压,然后完成电动机转速的操控。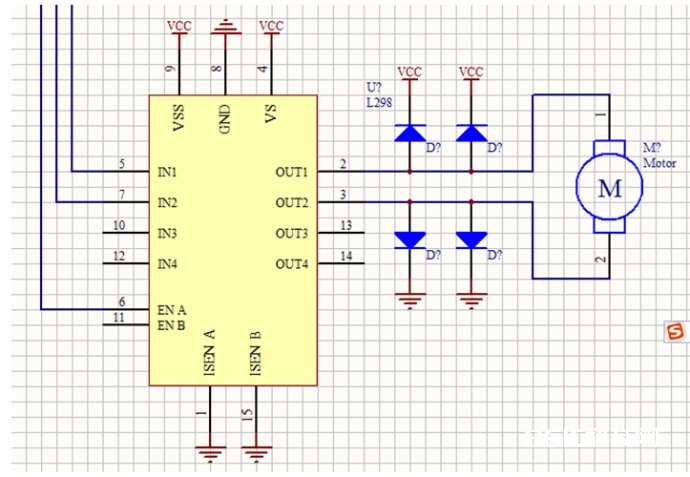
#include
#include
#define uchar unsigned char
#define uint unsigned int
sbit MOTOR_A_1=P3^6;
sbit MOTOR_A_2=P3^7;
sbit k1=P1^0; //界说k1为p1.0口
sbit k2=P1^1;
sbit k3=P1^2;
sbit k4=P1^3;
uchar T=0;
uchar W=0;
uchar A=0;
uchar k=0;
uchar i=0;
uchar code table1[]={
0x3f,0x06,0x5b,0x4f,
0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,
0x39,0x5e,0x79,0x71};
uchar code table2[]={0xfe,0xfb,0xfd,0xf7};
void delayms(uint t);
void disp(void)
{
P2=table2[3];
P0=table1[W]; //显现占空比个位
delayms(1); //延时1ms
P2=0xff; //P0清1
P2=table2[2];
P0=table1[W/100]; //显现占空比百位
delayms(1); //延时1ms
P2=0xff; //P0清1
P2=table2[1];
P0=table1[W/10];
delayms(1); //延时1ms
P2=0xff;
P2=table2[0];
P0=table1[A];
delayms(1); //延时1ms
P2=0xff; //P0清1
}
void init(void)
{
//发动中止
TMOD=0x01;
EA=1;
ET0=1;
TR0=1;
//设置守时时刻
TH0=0xff;
TL0=0xf6;
}
void timer0() interrupt 1
{
//重置守时器时刻
TH0=0xff;
TL0=0xf6;
T++; //守时符号加1
disp(); //数码管显现
if(k==0)
{
if(T>W)
MOTOR_A_1 =0;
else
MOTOR_A_1 =1;
}
else
{
if(T>W)
MOTOR_A_2 =0;
else
MOTOR_A_2 =1;
}
if(T==100)
T=0;
}
void delayms(uint t)
{
uchar j;
while(t–)
{
for(j=0;j<250;j++) //循环250次
{
}
}
}
void key(void)
{
if(k1==0) //按键1按下
{
while(k1==0); //按键1抬起
if(W==100) //假如脉宽为100
W=0; //脉宽置0
else
W+=1; //不然加1
}
else if(k2==0) //按键2按下
{
while(k2==0); //按键2抬起
if(W==0) //假如脉宽为0
W=100; //脉宽设置成100
else
W-=1; //不然减1
}
else if(k3==0) //按键3按下
{
while(k3==0); //按键3抬起
A=!A; //方向符号取反
k=!k; //按键符号取反
}
else if(k4==0) //按键4按下
{
while(k4==0); //按键4抬起
W=0; //脉宽清0
}
}






