


摘要:体系通过高速直流电机带动电扇旋转发生风压,在管道内发生空气活动,构成简易风洞。规划了以MSP430F149单片机为中心的操控体系,该体系由MSP430单片机最小体系、超声波检测、电机驱动、液晶显现器以及键盘操控,语音播报模块构成;通过PID中心算法,输出可调占空比的PWM波,驱动小球的上下移动;并通过超声波方位检测模块,实时检测小球的高度。实验成果标明该操控体系具有呼应速度快、操控精度高、抗干扰能力强等长处。
1 体系计划
1.1 体系整体计划规划
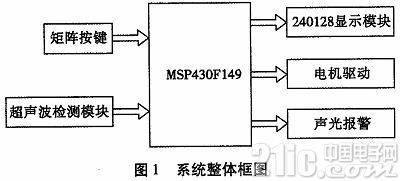
体系以MSP430单片机为中心模块,通过电机驱动模块带动扇叶,向圆管之内鼓风,将乒乓球吹起。通过超声波模块将乒乓球在圆管之内的方位检测出来之后回来方位数据给单片机,通过单片机的判别,操控风力的巨细,将乒乓球操控在所要求的方位。在240*128液晶上显现界面和体系当时的参数。还能够通过矩阵按键设置参数,到达恣意操控的要求,如图1所示。
1.2 规划计划证明
1.2.1 电机驱动模块
体系选用1298N电机驱动模块。L298N具有四通道输出,能够驱动两个直流电机。且该模块的驱动电流最大能够到达1.5 A。能够满意电机的驱动要求,还能够在输入端加上光耦阻隔,能够避免电机中止时反向脉冲烧坏单片机。
1.2.2 定位模块
超声波的检测间隔长,可到达4.5 m,而且该模块的反应速度也较快。能够依据自己所要求的时刻来详细调理发射和接纳时刻,操作较为便利。另一方面,红外对管检测办法具有模块的操作简略,只需将该模块的电位器调理就行,缺乏在于在垂直间隔较长情况下,需求繁琐的进程才干实时显现球的所在方位。但能够作为某一方位点的定位之用。
因而规划中选用了超声波模块与红外对管检测相结合的办法进行定位。
1.2.3 液晶显现模块
选用LCD240*128液晶显现,除了能够显现出字母、数字之外还能够显现多种取模图片。能够做到显现多样化。有较好的人机交流界面。
2 理论剖析和核算
2.1 超声波检测间隔核算
因为超声波原理,超声波在空气之中传达遇到障碍物的时分就会立刻回来。假定超声波的传达速度为V,发射和接纳的时刻差为t,就能够核算出发射点间隔障碍物的间隔S,如公式(1)所示。
S=V*△t/2 (1)
依据体系之中的超声波模块的特色,通过核算能够得出在2 cm到4.5 m之内的间隔丈量值。
2.2 克己风机的确认
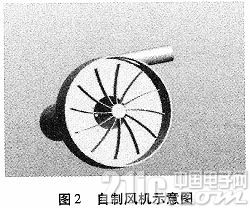
在体系中,需求将乒乓球在圆管之内上下吹动,这就会对风机的要求很高。一般的小电扇无法满意要求。所以挑选了高速直流电机,选用大PVC管和竖直圆筒,并结合鼓风机结构,将风吸入风道之后,通过一圈回流之后送入圆管。这样克己风机结构简略,安稳度高,较为牢靠。图2为克己风机示意图。
2.3 乒乓球操控算法的确认
关于乒乓球的运动进程有着严厉的要求。所以在操控小球的时分需求进行准确操控,通过挑选恰当的PID算法和有用的参数正定能够到达高精度操控意图。PID公式如式(2)所示。

依据上述公式,在最开端确认份额系数之后就开端确认微分器和积分器的数值。最终将三个系数写入程序之中,到达安稳。
3 电路与程序规划
3.1 电机驱动电路规划
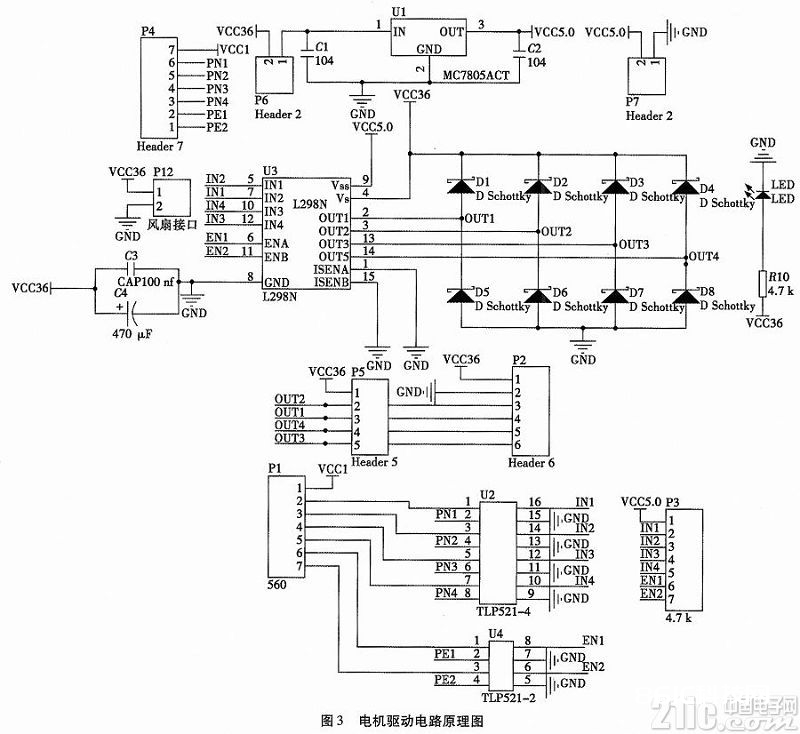
在输入信号之后,通过光耦阻隔,在光耦内部通过光电信号之间的转化,将输入的PWM波转化为电流电压相对较大的PWM信号。其信号保持一致或许取反。输出之后能够到达运用小电压小电流驱动大电压大电流的效果。驱动芯片挑选了常用的高电压大电流的全桥驱动芯片L298N,其呼应频率高,还能够完结频频的无极快速发动,制动和回转等长处,电机驱动电路原理图如图3所示。
3.2 主程序框图
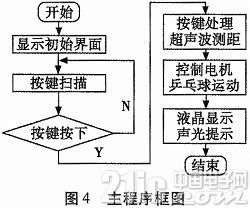
体系主程序框图如图4所示。
4 测验计划与测验成果
4.1 丈量仪器
数字秒表,卷尺,数据表。
4.2 体系测验办法及测验数据
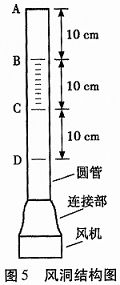
按图5所示风洞结构图,进入操作界面之后,开端测验。从第一项开端,逐项顺次测验,运用卷尺及数字秒表,看时刻是否到达要求。
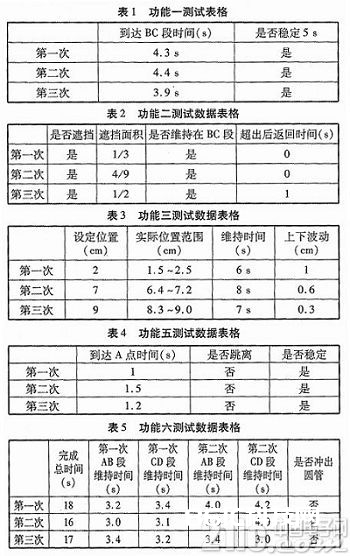
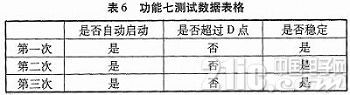
4.3 测验成果
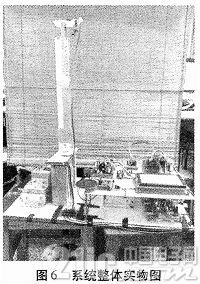
通过一系列测验标明整个体系能够彻底到达要求。不仅仅是完结要求中的精度,更是在本来的精度要求之上愈加的完善和准确,而且加入了言语播报体系,能够依据体系的不同状况宣布不同的声响。整个体系通过测验,作业安稳,精度高。体系什物如图6所示。
5 跋文
简易风洞及操控体系规划与完结,此规划取得2014年湖北省电子规划比赛TI杯,表现了自动操控与机械规划一体性的要求,是对自动操控原理的充沛使用。著作自身关于用于中小学学生对自动操控原理的了解和科普具有含义。






