


跟着科学技术的开展,自动化,智能化的程度进一步得到了进步,新一代转移车的研制在国内外遭到越来越多的注重。因为有一些物品具有很高的危险性,不能用人工直接进行转移,咱们规划完成了危险物品转移机器人体系。能够运用手动操控机器人的转移,防止了人与危险物品的直接触摸,适用于转移有毒、易爆的物品,在实践运用中很有含义。如果能够用智能化机器人体系来替代人来到危险区的话,那样将会大大削减许多事端的产生。
1 转移机器人体系的功用需求
该体系分为两部分:车载远端操控体系和监控渠道。车载远端操控体系依据监控渠道宣布的操控指令履行动作,并将收集到的实时视频图画发回监控渠道;监控渠道则不断接纳车载远端操控体系发回的图画和信息,依据状况遥控操作机器人,完成主从式遥控操作。该体系的规划具有以下的功用:
1)具有轮式行走机构,操控功能好,灵活机动,速度快,平稳,可靠性高;
2)具有视频监控的功用,能过看到周围的环境;
3)具有灵恬的机械手,平稳而快速地夹持危险品并转移至指定方位。
依据危险物品转移机器人功用需求的特色能够概括出该体系的功能需求首要包含:
1)机器人直线行走和转弯行走;
2)USB摄像头收集图画;
3)机械臂带云台,滚动规模180度;
4)AS-6DOFB型六自由度机械臂,用来抓取物品。
该体系以ARM处理器S3C6410为中心,选用6410开发板作为主板。各个模块都是由开发板操控。机器人首要由硬件体系和软件体系构成。硬件体系首要包含:ARM处理器、外围接口电路、六自由度机械臂、摄像头、小车车体以及电源等,其间ARM处理器中心;软件包含:嵌入式LINUX操作体系、外设驱动程序、LINUX运用程序等。该体系的作业流程为:机器人经过人的操控前后移动,当摄像头看到前方有危险物品时,机器人经过操控机械手对危险物品进行转移。
依据实践状况,本体系完成了以下模块,如图1所示。
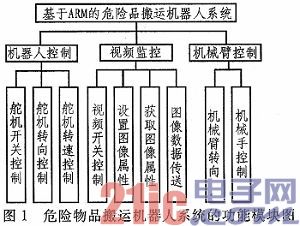
1)机器人操控:首要由电机的开关操控,电机转向操控,电机转速操控组合起来的。
2)视频监控:首要由视频开关操控,设置视频图画特点,获取视频图画特点,视频图画数据传送组成的。
3)机械臂操控:由机械臂转向,机械手打开闭合操控所操控的。
2 转移机器人体系的硬件规划
2.1 体系的全体硬件规划
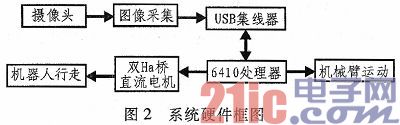
S3C6410是一个16/32位RISC微处理器,旨在供给一个具有本钱效益、功耗低,功能高的运用处理器解决方案,选用了64/32位内部总线架构。危险物品转移机器人的体系硬件框图如图2所示,摄像头担任进行图画收集,经过USB集线器传到6410处理器,中心操控器6410操控机械臂的运动,直流电机正反转向,然后操控机器人行走。
2. 2 直流电机驱动模块
驱动板首要选用了双Ha桥直流电机驱动芯片,咱们选用ST公司的L298N典型双H桥直流电机驱动芯片,用于驱动直流电机或双极性步进电机驱动电路芯片外围电路首要用由二极管构成的电桥电路,两组电机并联而成。
机器人经过选用L298N芯片驱动进行移动,红绿端子别离为左右两头直流减速电机接线座;EA、I1、I2与EB、I3、I4别离为操控信号输入接口,其间EA与EB别离是左右两路电机操控接口使能端,高电平有用,可用于PWM调速。表1为接口运用真值表,输入信号不同,对应电机作业状况不同。
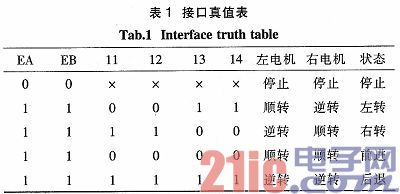
这儿EA、I1、I2操控左电机,EB、I3、I4操控右电机,EA、EB为PWM调速接口,加给高电平为全速。此处接口为单路四线两相步进电机接口,一起也能够驱动2路直流减速电机。
2.3 机械臂
为确保机器人作业的灵活性,机械手规划为由腰身、大臂、小臂、手爪组成,共具有3个关节(腰身-大臂、大臂-小臂、小臂-手爪)7个自由度(腰身1dof,大臂1dof,小臂1dof,手腕4dof)。其间:腰身——1自由度,做旋转运动。固定安装在机器人车底盘上,以车体正前方为基准,可别离向左右旋转135°,两头各有限位设备以防止自体磕碰。由液压操控运动,在底部装有电位计反应精确方位以确保操控精度;大臂和小臂——各1自由度,别离相对于上级关节做上下运动,以车体水平面为基准,大臂可向上运动45°、向下运动30°,小臂可向上运动25°、向下运动60°。由液压操控运动,用电位计回馈,确保关节方位精确;手爪——4自由度,别离做上下摇摆、旋转、弹性、夹持运动,以小臂延长线为基准,手爪可上下摇摆±90°,又能够小臂为基准轴旋转±180°,伸1米,选用伺服电机供给动力,经过减速箱减速确保功率需求,由伺服电机操控器操控。有编码盘反应,确保方位精确。腰身,大小臂液压回路有压力传感器维护。油压有安稳设备。
2.4 摄像头模块
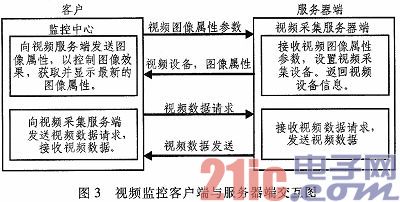
在视频收集服务器端,承受视频图画特点参数,设置视频收集设备。回来视频设备信息嵌入式嵌入式体系建立起来之后,就能够使用嵌入式操作体系内核供给的接口来开发视频监控软件模块了。它全体运转在服务器端,能够在没有外接网络的条件下独立运转。本模块完成了视频的收集、播映等功用,客户端与服务器端的数据交互如图3所示。
3 转移机器人体系的软件规划
3.1 服务器端软件规划
服务器端的软件运转状况图如图4所示,开端进入服务器端,当无指令进入时,为循环等候状况,等候承受指令;当接纳到指令时,判别是操控电机仍是操控摄像头指令:当操控电机状况,判别为操控机器人仍是机械臂;如果是操控机器人,则机器人循环等候操控指令,如果是操控机械臂,则机械臂循环等候操控指令。如果是操控摄像头指令,则进行图画、视频传输;当接纳到退出进入服务器状况指令时,退出服务器运转状况。






