


前语
在轿车使用中,磁性传感器可用于速度检测,如变速箱速度,轮速、凸轮轴速度等。在实践使用中,外界的搅扰如振荡会给信号处理带来额定扰动或许噪声。为了确保输出信号准确性,以确保体系可靠性,有必要对这些扰动或许噪声经过必定算法进行按捺。
1.0 英飞凌磁性传感器根本磁滞算法
磁速传感器针对轿车范畴不同使用,其相应使用环境也有所不同,例如方针轮齿距巨细,振荡环境等。为了更好习惯不同使用,以取得更好功能,英飞凌磁性传感器供给灵敏的磁滞算法。首要有四种磁滞算法: HF(Hidden Fixed),VF(Visible Fixed), HA(Hidden AdapTIve),VA(Visible AdapTIve)。
1.1 根本磁滞算法
关于Hidden磁滞算法,信号在过零点处切换。因为Hidden磁滞算法切换点在过零点处,因而可以防止遭到随空气空隙改变而改变的信号起伏巨细影响。因而关于小齿距方针轮而言,Hidden磁滞算法可以在信号幅值受气隙改变影响下仍然可以取得最佳的相位精度。
关于Visible磁滞算法,信号在磁滞比较器水平上切换,在磁滞带内的信号会被作为噪声而被按捺。因而关于齿距较长的方针轮如变速箱方针轮,选用Visible磁滞算法,可以取得比较安稳的输出信号。
磁速传感器速度检测一般使用差分原理,即磁速传感器经过检测差分磁场改变来检测方针轮速度及滚动方向。英飞凌磁速传感器两个磁性探头(如霍尔探头)之间间隔一般为2.5mm,因而信号输出最理想的对应齿距为2.5mm*2等于5mm。假如齿距过大,那么在齿轮上会有一段间隔因为两个霍尔探头之间检测到的磁场值持平,即ΔB为零。假如挑选Hidden磁滞,长齿(或缺)处输出信号颤动较大。而选用Visible磁滞算法,因为切换点不在过零点处,因而输出信号相对安稳。 如图1所示为Hidden磁滞和Visible磁滞算法比较,从图中可以看出,针对长齿或长缺(图例为曲轴使用)方针轮,Visible磁滞算法输出信号较Hidden磁滞算法安稳。
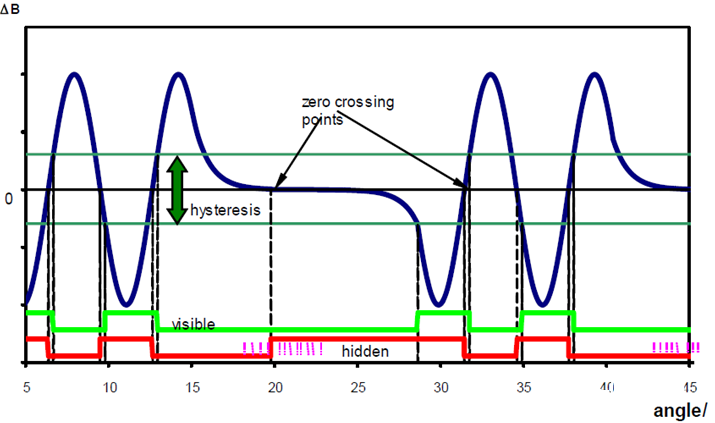
图1:Visible 磁滞和 Hidden磁滞比较
英飞凌磁性传感器供给两种磁滞比较器水平,即Fixed和AdapTIve。
所谓Fixed磁滞,即磁滞带阈值为必定值,不会依据随气隙改变而改变的信号起伏巨细而进行相应调整。
所谓AdapTIve磁滞,即磁滞带阈值会依据输入信号进行动态调整以习惯气隙改变,然后输出更好相位精度。选用Adaptive磁滞算法,必定程度内可以起到振荡按捺作用,以消除因为气隙或许温度等改变对输入信号形成的影响。
1.2 磁滞算法在变速箱速度检测中使用
依据变速箱品种,变速箱体系一般要安装一个或许多个变速箱速度传感器,用于检测输入轴和输出轴速度,关于输出轴有些还需要供给方向信号。车身电脑依据变速箱速度及方向信息,可用于车速核算,电子离合器操控,档位操控,坡道辅佐等。为了确保变速箱准确操控,体系要求信号振荡起伏操控在必定规模,如±1°。这就要求传感器可以按捺因为噪声或许体系振荡形成的信号搅扰,例如发动机振荡,变速箱换挡时轴向振荡,变速箱低速作业时带来的噪声以及振荡。
别的,比较于其它速度检测使用如轮速等,变速箱速度齿轮齿距相对较大。结合前面所述,为了习惯变速箱速度检测使用要求,按捺因为振荡带来的噪声或许搅扰,减小由大齿距形成的信号颤动,一般对变速箱速度传感器选用Visible Adaptive磁滞算法。
2.0 新一代变速箱速度传感器
英飞凌TLE495X系列传感器是专门针对变速箱使用开发的新一代速度传感器,包括TLE4951C,TLE4954C,TLE4954CE1,TLE4954C E2等。其间TLE4951C仅检测速度信息,TEL4954C除检测速度外,还可以检测方针轮滚动方向。
TLE495X系列传感器为两线制PWM电流协议,选用Visible Adaptive 磁滞算法,其信号切换磁滞磁比较器水平为 信号峰峰值处,在 信号幅值内的信号均会被按捺。又因为是Visible磁滞算法,因而可以防止信号过零点处的噪声以及振荡。
2.1 振荡按捺算法准则
TLE495X系列传感器有三个霍尔探头,左右探头用于检测速度,中心霍尔探头用于检测方向以及振荡按捺算法。关于TLE4951C而言,尽管没有输出方向信息,但仍然有中心霍尔探头,首要用于振荡按捺。
TLE495X系列传感器具有优异的振荡按捺才能,经过速度信号和方向信号彼此监测用于判别信号振荡与否。如图2所示,方向信号通道过零点处监测速度信号通道幅值以及相位,一起速度信号通道过零点处监测方向信号通道幅值以及相位。只有当速度信号幅值大于ΔBspeed_limit以及方向信号幅值大于ΔBdir_limit时输入差分磁场信号才有用。
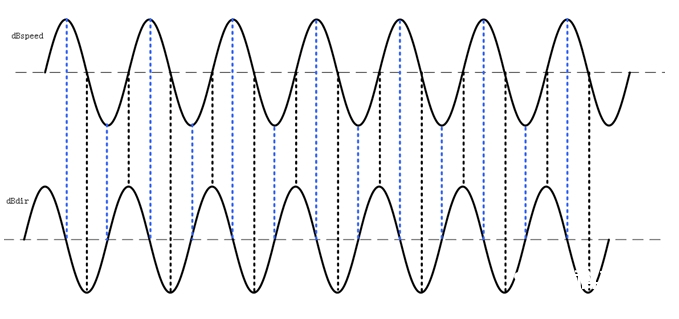
图2:TLE495X系列振荡按捺算法
经过信号幅值和方向信息用于判别及检测信号噪声以及振荡,因为径向(视点改变)或许轴向(气隙改变)上的振荡形成的额定磁场信号会被按捺掉。磁场信号噪声以及搅扰断定准则首要有如下三点:
1)速度信号幅值小于内部磁滞带阈值
-速度信号幅值没有超越磁滞比较器水平,会被作为噪声或许搅扰而被按捺掉。
2)方向信号幅值小于内部磁滞带阈值
-经过核算方向途径和速度途径实践信号和最终一个采样信号之间差值来判别方向信号有用性。即ΔBspeed=dBspeed(n)-dBspeed(n-1)以及ΔBdir=dBdir(n)-dBdir(n-1);
-假如该差值太小,则断定方向信号无效而被作为噪声按捺。
3)方向信号包括左右替换的方向信息
-方向信号包括忽左忽右的方向信息。
2.2 动态查看
TLE495X系列变速箱传感器在作业过程中可以进行动态查看,辨认并按捺径向和轴向方向振荡带来的噪声及搅扰。
2.2.1 径向振荡按捺
如图3所示,速度通道信号过零点处上升沿和下降沿采样到方向信号相同幅值时,按捺算法会断定为是径向颤动,如变速箱换向时带来的方向改变或许视点颤动,此刻输出信号会被按捺。
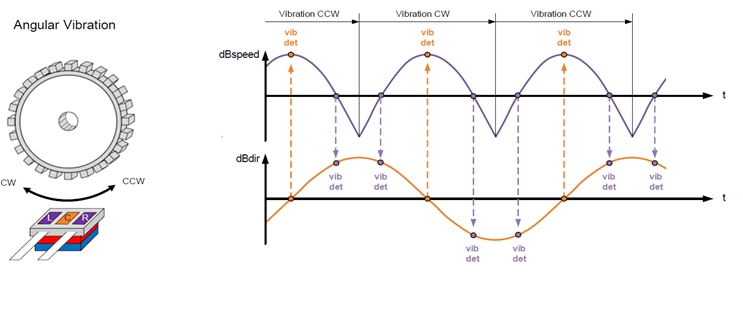
图3:径向振荡按捺
2.2.2 轴向振荡按捺
如图4所示,方向信号通道采样到相同相位和幅值巨细的速度信号时,按捺算法会断定为轴向振荡,此刻输出信号会被按捺。

图4:轴向振荡按捺
3.0 总结
英飞凌磁性传感器在市场上具有领先地位,其磁速传感器供给多种磁滞算法,可以满意不同轿车范畴速度检测使用。最新一代速度传感器TLE495X系列传感器是专门针对变速箱速度检测开发的传感器,具有优异的振荡按捺算法及输出功能。
附录:参考资料:
1. TLE4954C datasheet
2. TLE492XC FAQ






