


摘要:规划出一个依据容纳式结构的智能循迹小车,该小车选用单片机AT89S51作为操控器。该体系首要有避障行为模块、轨线盯梢行为模块、长途操控行为以及紧迫泊车模块。选用红外传感器规划检测轨线模块,超声波传感器规划避障模块。关于避障行为模块,提出选用含糊操控算法进行避障。经很多试验验证该小车不只能安稳盯梢轨线,并且能绕妨碍物行走。
智能小车是一种集环境感知、动态决议计划与规划、行为操控与履行等多种功用于一体的归纳体系,是一种功用简化的移动机器人,广泛用于智能吸尘器、转移小型物件、整理废物等。所谓智能,便是没有人为干涉下能主动完结给定的使命。可是,环境不知道,履行使命杂乱,单一的传感器不能完结其功用,多传感器信息技术被用来感知周围环境与使命履行是一种有用的办法,经过多传感器信息的归纳判别处理,取得对环境的正确理解,使小车体系具有容错性,确保体系信息的快速性和正确性,其牢靠度高于单个传感器所能到达的方针。
常用机器人的体系结构有分层体系结构、容纳式体系结构和混合式体系结构。在20世纪80年代Brooks提出了机器人的行为主义和容纳结构,将杂乱的使命分化成多个简略的能够并发履行的单元,每个单元有自己的感知器和履行器。多个行为相耦合构成层次模型,要点强调在不同层间的联络以及不同行为功用分配。智能小车也便是简化的移动机器人,其运动操控便是经过调理智能小车的运动速度和运动方向,使智能小车沿希望的途径运动。机器人的行为能够分为两大类:反响型和慎思型。
反响型行为是一种鼓励一呼应行为,不需求核算进程,呼应时间短。Brook等提出的容纳结构便是典型的反响范式,行为依照才能的等级进行分层,坐落较高层次的行为能够掩盖相邻低层次的行为输出。慎思行为是可学习的,有意识的行为。它是将规划加入到反响式中,使得机器人具有回忆和推理才能。传统的依据感知-建模-规划-动作的办法不易树立精确的环境模型,并且较难完结动态的、不知道环境下的途径盯梢。反响式是一种从感知到动作的直接映射,智能小车能够对外界环境作出快速呼应。
依据本文的研讨意图,在不知道的、动态的室内环境规划一个智能循迹小车,不只要求安稳实时盯梢给定轨线运动,且盯梢进程主动绕开妨碍物,选用一种依据容纳式结构的轨线盯梢操控办法规划智能循迹小车。
1 智能循迹小车规划原理
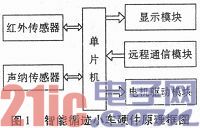
智能循迹小车在没有人干涉的环境中,能沿给定道路行走并在忽然有妨碍物呈现时能绕开妨碍物或许紧迫泊车。本次规划的小车首要完结智能循迹,选用单片机AT89S51作为操控器,选用反射式红外线光电传感器用于检测路面的引导轨道,选用压电式超声波传感器来完结对小车的智能避障,用NT-T10A发射模块和XY-R04A接纳模块作为无线长途操控模块,完结对智能小车的长途操控,一起在LCD屏幕上显现小车的运转状况,速度等状况,两直流电动机即左右轮各一个,选用L298N来驱动电动小车的两台直流电动机完结小车的直行与转弯。该体系的首要完结硬件结构结构图如图1所示。
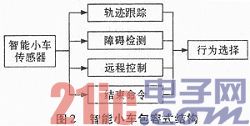
智能小车的首要使命完结轨道盯梢,首要依据红外传感器取得路面信息,检测盯梢轨道线,经过取得的轨道信息进行核算,判别驱动左轮仍是右轮,向左或向右转动视点,一起发动避障功用,检测是否有妨碍,如果有,完毕轨道盯梢,进行避障。判别是否有长途人为操控指令,如果有,就完毕轨道盯梢或许避障功用,呼应长途操控指令。一起检测是否有完毕程序指令,如果有,就完毕一切使命。该体系根本行为模块如图2所示,选用水平分化使命结构形式,每个行为都在运转,经过单片机中止设置完结。
2 行为模块规划
2.1 避障模块规划
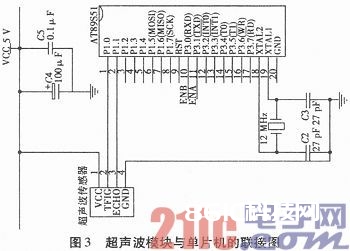
选用两个超声波传感器,别离规划在小车左边与右侧。图3为左边超声波传感器与单片机相连。VCC接5 V电源,Trig与AT89S51单片机的P1.0相连,Echo与AT89S51单片机P1.1相连,GND与地相连即可。右侧传感器衔接办法与左边相同,可是与单片机衔接别离为P1.2与P1.3。
妨碍物间隔信息是超声波从发射声波接纳到反射回来声波的时问间隔与速度乘积得到。设时间间隔为t,超声波在空气中的传播速度为v,则传感器与妨碍物的间隔d为:

避障不只能够使智能小车顺畅履行使命,并且能够阻挠智能小车对环境的损害。现在移动机器人用于避障的办法较多,就环境信息已知的研讨来看,首要有矢量力场法、栅格法、人工神经网络法、模拟退火算法、蚂蚁算法等。关于环境不知道的避障研讨有人工势场法、含糊逻辑法等,含糊逻辑法将含糊操控自身所具有的鲁棒性与依据生理学的“感知-动作”行为结合起来,为移动机器人在杂乱环境中的避障导航提出了新的思路。含糊逻辑法避开了对环境信息依靠的特色,对处理不知道的、实时的杂乱环境具有较强的优越性。关于妨碍物避障选用含糊操控算法进行避障,关于智能小车与左右侧妨碍物之间的间隔分为三个语意变量即大、中、小,输出的速度也分为三个语意变量即快、中、慢本规划选用PWM波操控电机转速,含糊操控器输出直接操控脉冲宽度。
2.2 轨道盯梢模块
本体系共规划三个红外线传感器,别离放置在电动车的左、中、右三个方向,用来读取地上的黑色轨道线。当行车方向违背轨道的时分,经过这三个红外线感应设备就能够判别出行车违背的方向,将实时信息以凹凸电平的办法传送回单片机,然后经过单片机的处理,相应的操控直流芯片就能够批改行车道路,终究完结主动寻迹的使命。红外线传感器的作业进程如下:当行车方向向右违背轨道线的时分,会有两种状况发生:1)中心和左边红外线传感器一起触摸到地上黑线,右侧传感器触摸白色地上;2)左边一个传感器触摸黑线,中心和右侧传感器触摸地上白色部分。这两种状况都是行车方向右偏移的状况。类似的小车发生左偏移的时分也有两种状况。这三个传感器作为行车数据的输入信号由单片机的I/O口输入,那么就需求一个TFL的电压,并且要依据需求能够对传感器的灵敏度进行微调,满意灵敏度的需求。所以能够把这三路信号引进由LM324组成的电压比较器进行电平的整形,终究给单片机运用。
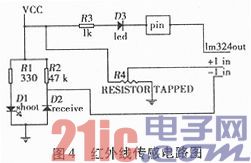
图4是一路红外光传感器电路的原理图。VCC接入5 V电源,D1是红外线发射管,上接一个限流维护电阻R1,D2是红外线接纳管,上接一个上拉电阻。当触摸的是白色地上的时分,红外线被反射回接纳管,接纳管就导通,这路传感器就输出低电平信号给LM324的反相端口,此刻由变阻器引出的是一高电平信号给LM324的同向端口,那么经过LM324的比较,便输出一个高电平信号给排针,而和排针串联的发光二极管阴极是LM324的高电平无法导通也就不能发光。若是传感器触摸到的是黑色导线的话,那么红外线就被吸收,而接纳二极管便截止,此刻传感器就输出高电平给LM324的反相端口,LM324同向端口的电平没有反相端口的高,LM324就输出低电平给排针,串接上排针的发光二极管就导通,提示这路传感器正触摸黑色导线。电机转速依据左、中、右红外传感器检测成果,经LM324整形后给单片机,单片机输出不同PWM波操控左右轮电机转速。
3 行为操控模块规划
依据行为的体系作为一个稠浊体系,既要安稳地操控智能小车的接连动力学行为,一起又要体系地、战略地上对出人意料的随机事情(例如环境中的妨碍)。首要问题便是怎么规划多种或许的有用行为,其次是怎么有用地和谐或交融不同类型的行为之间的抵触或竞赛,然后到达一个令人满意的作用。为了能够一起完结多个方针,有时分智能小车需求履行多个根本行为。在某个时间仅有一个行为被触发,体系一般都能够比较平稳地运转。可是,当两个乃至更多的行为一起触发,并且每个行为都需求智能小车履行不同的操作时,智能小车该怎么办呢?
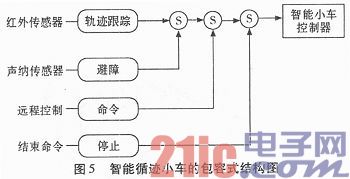
本规划为处理智能小车实时性问题,挑选选用容纳式结构进行使命决议计划,容纳式结构将杂乱的轨道盯梢使命分化为水平的若干个子使命,每个子使命功用层具有独立完结使命的功用。高层功用层按捺较底层功用层,如图5所示,轨道盯梢体系层为高层功用层。依据行为操控办法,首要确认功用层的优先级,功用层越低优先级越高。如图5所示,功用层完毕指令最低,可是优先级最高,当运动进程中需求履行完毕指令时,小车在履行其它三个功用之一,首要呼应完毕指令,轨道盯梢功用层最低,当有妨碍时分,智能小车首要履行避障,然后履行轨道盯梢。本次规划共有4个功用层:
1)遇到紧迫行为需求中止运转程序;
2)长途操控行为;
3)避障行为;
4)轨道盯梢行为。
依据行为操控办法,首要确认功用层的优先级,功用层越低优先级越高,即Leve10优先级最高,在发生意外状况时,人工能够经过完毕程序运转来完毕进程。人为长途操控作为榜首层,能够完结操作员的希望。忽然碰到妨碍物时,避开妨碍物作为第二层,循迹进程中绕开妨碍,才持续循迹。
红外传感器发生的轨道盯梢行为设置为最高层,因为在盯梢进程中,智能小车以及人的安全性榜首,所以它的优先级最低。图5中圆圈中的S为“suppress”的意思,即高优先级的行为按捺低优先级的行为操控,当在轨道盯梢进程中,忽然有妨碍呈现,智能小车首要发动避障行为,暂停盯梢行为,避障行为完毕当即履行盯梢行为。
4 试验成果剖析
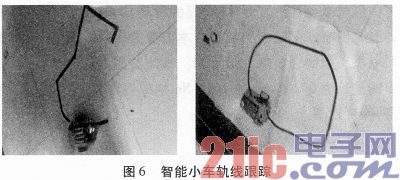
规划的循迹小车具有较好的盯梢作用,别离在地上与白纸上做了轨道盯梢试验。小车盯梢轨线如图6所示。关于本文规划的智能循迹小车不只直线能安稳盯梢,即便不规则曲折的线也能较好地盯梢。
因为在软件中设置了用于防搅扰的盲走程序。所以,能够经过运用轨道线不均匀的差错跑道和过弯测验的办法来查验体系的抗搅扰功能。经过测验,当路面的轨道线不均匀的时分,小车能够依据前一个状况指令进行盲走,能够经过轨道不均匀的轨道线段。小车程序段中设置了原地自转的程序,理论上小车能够经过挨近180度的弯道。所以小车具有必定的过弯功能。经过测验,在弯道处小车能够经过。可是因为小车的行进速度操控不均匀,在直线和弯道触摸段是有必定冲出跑道的几率的。
小车在循迹进程中呈现偶尔状况时,即忽然遇到一个妨碍物时,小车能沿妨碍物行走,直到遇到轨线没有妨碍物在前面时持续循迹。当妨碍物靠得很近或许是在一个关闭的小范围内时,小车或许有时来不及直走就直接右转行进了,导致小车在这个范围内一向坚持右转行进,在一起检测到没有妨碍物与轨线时,阐明小车轨线盯梢失利,主动完毕程序,小车中止。
5 定论
本文规划出一种依据容纳式行为操控的智能循迹小车,选用单片机AT89S51作为操控器,红外传感器检测轨道线,将检测成果经LM324整形后传给单片机,规划程序输出合适的PWM波操控智能小车左右轮转速。超声波传感器检测妨碍物信息,规划含糊避障操控器,将操控器输出成果用于电机转速操控,使智能小车完结主动避障,且绕妨碍物行走。在室内外做了很多的试验,本文规划的小车不只能安稳地盯梢黑色轨道线,并且遇到妨碍物时分能绕妨碍物行走。






