


一、项目规划布景及概述
在许多工程运用中,都需求丈量载体与水平面的歪斜视点。关于导航定位体系来说,姿势信息更是一个重要参数。本体系首要方针是在动态情况下经过姿势交融得到精确的俯仰角和横滚角。首要选用加速度传感器丈量歪斜视点,并对丈量角进行数据预处理以削减差错,其次参加陀螺仪进行姿势交融,首要办法为卡尔曼滤波,得到体系的横滚角和俯仰角。该办法广泛运用于工程中,技能老练,姿势交融作用杰出。
惯性丈量单元在飞行器制作、传感器技能领域都能见其身影,运用远景非常广泛。一般的,一个IMU包含了三个单轴的加速度计和三个单轴的陀螺,加速度计检测物体在载体坐标体系独立三轴的加速度信号,而陀螺检测载体相关于导航坐标系的角速度信号,丈量物体在三维空间中的角速度和加速度,并以此解算出物体的姿势。在导航中用着很重要的运用价值。
为了进步可靠性,还可认为每个轴装备更多的传感器。一般来说IMU要装置在被测物体的重心上。IMU大多用在需求进行运动操控的设备,如轿车和机器人上。也被用在需求用姿势进行精细位移核算的场合,如潜艇、飞机、导弹和航天器的惯性导航设备等。运用三轴加速度计,受外力加速度影响很大,在运动/振荡等环境中,输出方向角差错较大。加速度丈量的是重力方向,在无外力加速度的情况下,能精确输出ROLL/PITCH两轴姿势视点,而且此视点不会有累积差错,在更长的时刻标准内都是精确的。可是加速度传感器测视点的缺陷是加速度传感器实践上是用MEMS技能检测惯性力形成的细小形变,而惯性力与重力实质是相同的,所以加速度计就不会区别重力加速度与外力加速度,当体系在三维空间做变速运动时,它的输出就不正确了。
二、项目规划原理
1、 原理概述
陀螺仪输出角速度,是瞬时量,角速度在姿势平衡上是不能直接运用,需求角速度与时刻积分核算视点,得到的视点改变量与初始视点相加,就得到方针视点,其间积分时刻Dt越小,输出视点越精确,但陀螺仪的原理决议了它的丈量基准是本身,并没有体系外的肯定参照物,加上Dt是不可能无限小,所以积分的累积差错会跟着时刻消逝敏捷添加,终究导致输出视点与实践不符,所以陀螺仪只能作业在相对较短的时刻标准内。
所以在没有其它参照物的基础上,要得到较为实在的姿势角,就要运用加权算法取长补短,结合两者的长处,抛弃其各自缺陷,规划算法在短时刻标准内添加陀螺仪的权值,在更长时刻标准内添加加速度权值,这样体系输出视点就挨近实在值了。
2、 硬件规划原理
2.1加速度计模块
图2.1为加速度传感器模块电路图。加速度计选用Analog Device(亚德诺半导体)公司的ADXL345,该传感器是一款三轴数字加速度传感器,其感应精度可达3.9mg/LSB,倾角丈量典型差错小于1°,且感知加速度的最大规模是 16g。具有超低功耗、采样速率可调、丈量形式可调等特色。在实践运用过程中,一般设置感应规模为 2g,感应精度为3.9mg/LSB,这样能够进步输出数据的稳定性,满意体系加速度规模和精度要求。它能够在歪斜检测运用中丈量静态重力加速度,还能够丈量运动或许冲击导致的动态加速度。
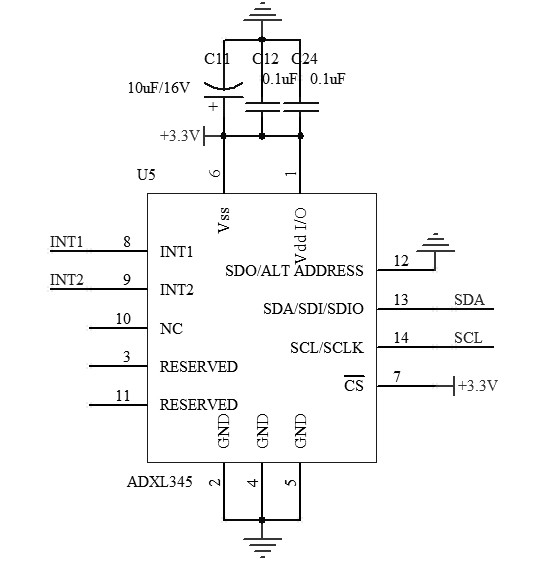
图2.1 加速度计模块原理图
2.2陀螺仪模块
陀螺仪选用InvenSense(应美盛)公司的ITG3205。图2.2为陀螺仪模块的原理图规划。该芯片用于丈量绕三轴滚动的角速度值,是一个数字输出的将X、Y、Z三轴角速度传感器整合在单一电路上的三轴陀螺仪。其特性在于运用了三个16位A/D转换器来数字化陀螺仪输出端,有程控的内建低通滤波器带宽,以及快速形式的I%&&&&&%接口。除此之外,还有内建温度传感器以及精准差仅为2%的内建震动规划。
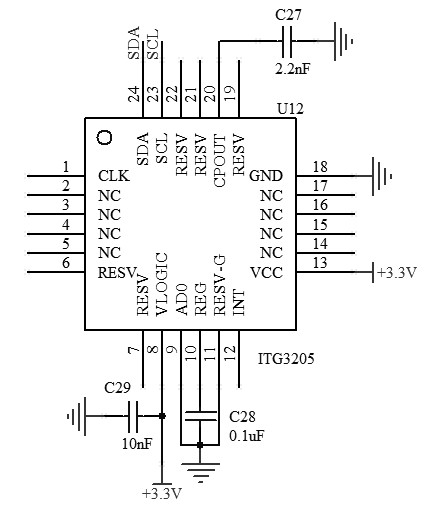
图2.2 陀螺仪模块原理图
陀螺仪能够丈量载体角速度,具有高动态特性,可是它是一个间接丈量器材,它丈量的是视点的导数(角速度),所以有必要要将角速度丈量值对时刻积分才干得到视点。
3、 软件规划原理
体系上电后完结一系列初始化过程后便进入作业状况。分别对三轴加速度计、三轴陀螺仪进行数据的收集与补偿,经过加速度计与陀螺仪的姿势交融,得出载体在静态与动态条件下都精确的俯仰角和横滚角。体系软件选用模块化规划,依据不同的功用选用不同的程序块,能够简化编程,使体系结构明晰,一起,能够添加代码的重用性,便于完结功用扩展。
三、项目规划框图
1、硬件规划框图
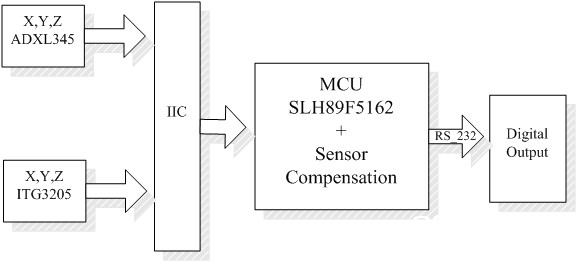
图3.1 硬件规划框图
2、软件规划框图
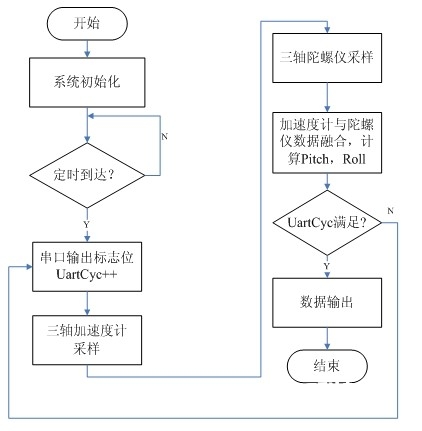
图3.2 软件规划流程图
3、姿势交融算法框图
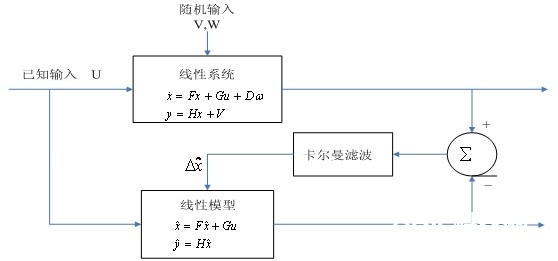
图3.3 卡尔曼滤波结构框图
四、测验成果
项目到达的要害硬件目标
4.1体系实物图片
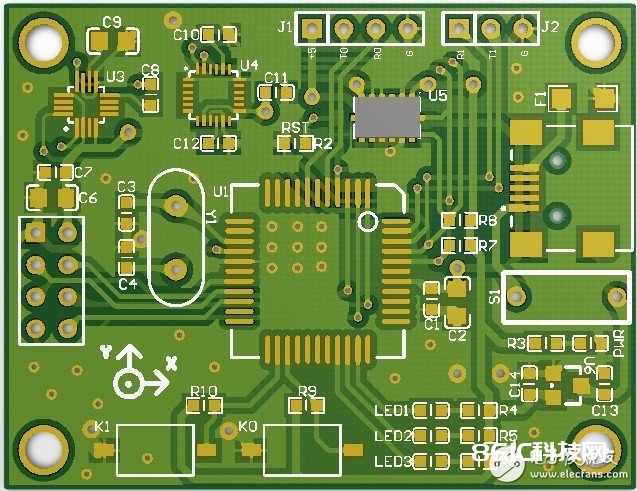
PCB正面图:
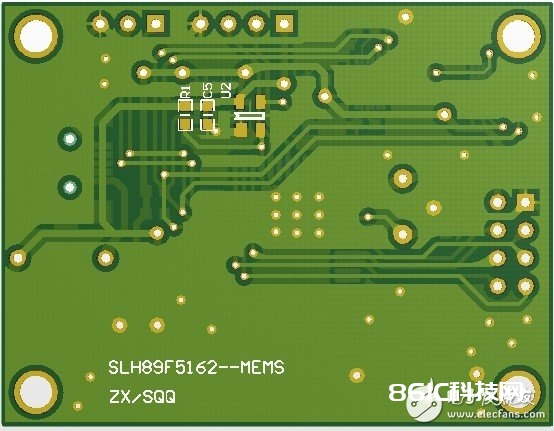
PCB不和图:
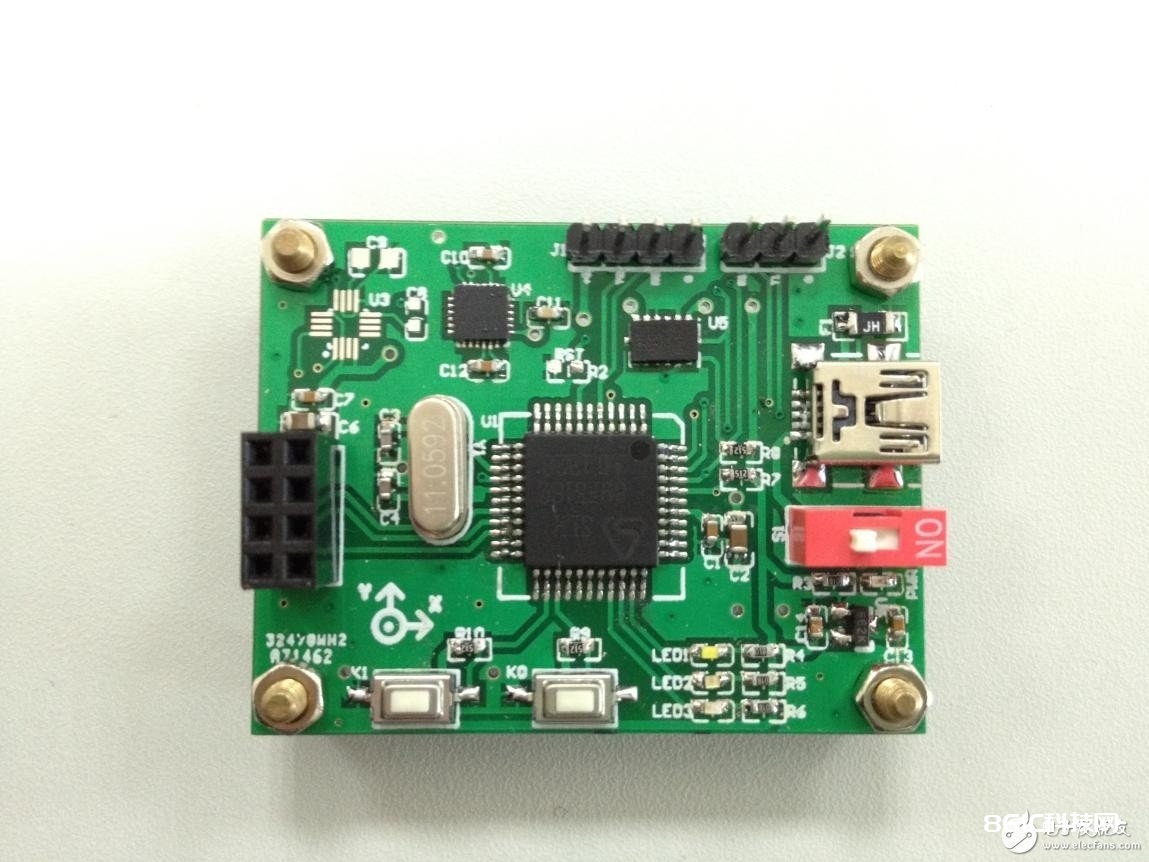
项目实物图:
4.2姿势交融作用剖析
体系选用卡尔曼滤波函数进行加速度计与陀螺仪的姿势交融。图4.1所示为姿势交融前的体系水平常横滚角输出曲线图,即仅由加速度计ADXL345核算得到的视点。该组试验在动态条件下完结,即坚持载体与水平面视点不变的前提下(在此测验横滚角,并取视点值为0°),人为给体系施加外力作用,使体系遭到外部加速度搅扰,一起记载数据制作曲线。从图中能够看出,在体系遭到外力作用下,数据精确度大大下降。图中最大差错到达50°。
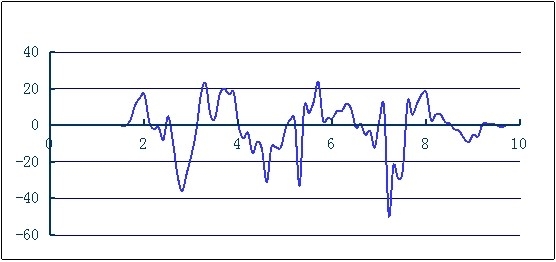
图4.1 姿势交融前横滚角输出曲线图
图4.2所示为姿势交融后的体系水平常横滚角输出曲线图。从图中能够看出,即便体系遭到外部加速度的搅扰,仍能坚持横滚角在0°及0°邻近很小的规模内动摇。最大差错仅有1°。姿势交融算法有用减小了动态条件下的体系差错。
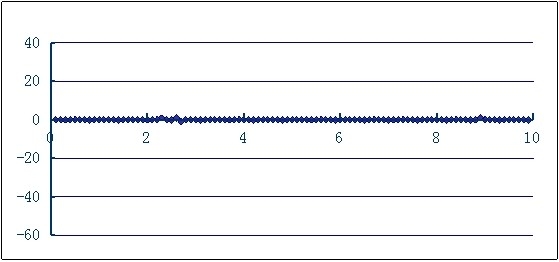
图4.2 姿势交融后横滚角输出曲线图
视频网址 http://pan.baidu.com/s/1dDoW0d7






