


1 前语
三坐标丈量机丈量原理便是将被测物体置于三坐标丈量空间,可获得被测物体上各测点的坐标方位,依据这些点的空间坐标值,经核算求出被测物体的几许尺度和形状。经过与CAD 规划模型的比对,能够检测加工零件的合格性,在工业实践中有着巨大的使用价值。
依据CMM的触摸式丈量方法具有丈量精确度高的长处,常用的数据搜集方法有手动采样形式和主动采样形式。
1.1 手动采样形式
选用Joystick 驱动探头去触摸零件外表,探头的探针每次触摸零件外表,就搜集一个概括的数据,然后再移动一个间隔,搜集下一个概括数据,终究得出丈量外表信息。手动采样的速度较低,靠教来移动机台,功率低下,不合适工业大批量丈量的要求。
1.2 主动采样形式
为了处理手动采样功率低下的问题,必需求开宣布能够主动丈量的技能,完成丈量途径的预生成,再让探头依照生成的途径接连运动去搜集点的信息,这样就提高了功率,能够处理大批量丈量的问题。
现在咱们用的来自美国的一套三坐标丈量机上层软件功用十分强壮,能够完成数据的主动搜集并与模型的规范数据比对,生成一个报表,终究还能参加数据库中供参阅与查阅。这套软件供给一个与操控器的通讯协议,咱们就使用这个协议在固高板卡这个操控器渠道上开
宣布了一套下位机的操控软件,来与上位机软件合作完成对探头的驱动以及点的搜集。
2 体系构成
图1 CMM 体系构成图
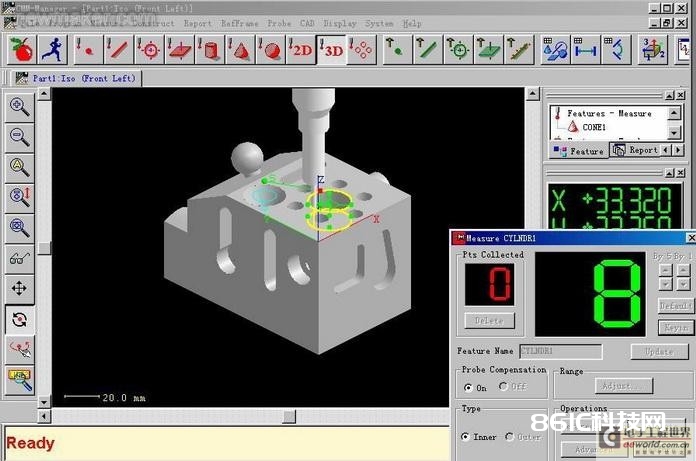
图2 CMM-Manager 软件
1) 方位反应:必需求有轴端编码器反应,能够实时监控机床各轴抵达的方位,以便于丈量点的搜集与上层软件的模仿仿真,即便在长途也能明晰观测到丈量的完好进程,固高运动操控板卡,不只能够供给模仿电压输出的闭环操控,在板卡上作了方位的闭环,一起还能够操控步进电机以及脉冲输出的伺服电机,在这种情况下需求有轴编码器通道来搜集运动轴的方位信息,关于在丈量中的这两种方法,固高都供给完善的处理方案。
2) 支撑手动运转与主动运转的完美切换,在丈量中手动定坐标系与手动搜集十分重要,手动运转选用Joystick 三维模仿摇杆,能够一起完成三轴的无级调速,主动运转中丈量途径有必定的矢量要求,有必要能够完成空间三维的插补运动,可见手动与主动在运动上有
不同的要求,固高运动操控器支撑点位功用又支撑接连轨道功用,能够完成对这个问题的完美处理。
3) 精确定位,回零的精度将直接影响到丈量的精度,固高板卡供给Home+Index 的回零方法,能够将回零精度到达微米级。供给的回零流程为:
a)发动Home 捕获,当Home 捕获触发时,运动到Home 捕获触发时的方位
b)运动中止后,发动Index 捕获,反向运动一圈半
c)当Index 捕获触发时,运动到Index 捕获触发时的方位
d)运动中止后,将方针方位和实践方位清0
码器信号一起锁存下来,差错不超越正负一个脉冲,没有时刻滞后的问题,这是十分精确的方位锁存,特别合适使用在要求十分高的丈量范畴。
4 软件编制
依据美国的这套上层软件,合作固高的运动操控器渠道,咱们开发了依据嵌入式Dos渠道的基层操控软件,上层软件供给给咱们的仅仅是一个接口协议,经过RS232 来进行传输数据,咱们要做的首要便是摸清它的通讯协议,做好数据承受与译码的作业,然后便是依据不同的指令来驱动探头去搜集所需求的点信息,悉数的流程咱们在主循环中来完成,CMM体系中有必要的一点便是要有回退功用,当探头碰到工件外表时,当即依照设定的回退矢量与回退间隔回退到一个方位,它的运动指令首要分为PT 定位指令与PM 丈量指令,详细软件流程如下图:
图4 主程序流程图
经过在固高四轴演示箱渠道上的仿真试验证明,选用固高板卡的三坐标丈量体系彻底满意丈量范畴的工艺要求,运转进程平稳,到位精确,能够到达十分高的丈量精度。(end)






