


传统的电流式操控办法是检测流经绕组的电流,并将反应信号送到操控芯片,然后由操控芯片决定是添加仍是下降绕组电流,以获得所需的电流强度。这种操控办法使电机在宽转速和宽电源电压范围内坚持抱负的转矩,十分适用于全步进和半步进电机驱动,并且完成起来十分简单。
闭环操控电路将电流施加到绕组。反电动势(BEMF)会下降绕组电压,延伸电流到达抱负值的时刻,因而,反电动势约束电机转速。尽管体系无需知道反电动势值,可是,不注重且不批改这个数值将会导致体系功用下降。
由于电源电压改变导致峰值电流有时动摇起伏很大,所以,直到现在,工程师仍是尽量防止运用电压式操控办法。工程师们还想防止反电动势跟着电机转速添加而升高的问题。
在这种情况下,业界呈现了能够补偿反电动势的智能电压式操控体系。这种驱动办法使电机工作更顺利,微步分辨率更高,是对高精度定位和低机械噪声要求严厉的运用的抱负挑选。电压式操控是一种开环操控:当正弦电压施加到电机相位时,机电体系将回馈正弦电流。
咱们能够用数字办法补偿反电动势和峰流改变。在记住电机的精确特性(电机电感-转速曲线、反电动势-转速曲线、电机电阻)后,核算并施加电压,以获得抱负的电流值。
电压式操控办法是向电机施加电压,而不是恒流。施加的电压值能够补偿并彻底消除反电动势效应,施加电压的上升速率与因电机转速添加而导致反电动势上升的速率相同,确保电流起伏对转速曲线平整。在已知所需电流后,就能够确认获得该电流需求施加的精确电压值。因而,电流是由电压直接操控,如图1所示。

图1:反电动势(BEMF)补偿
电压式操控还节省了分流电阻,可获得高微步分辨率和极低的转矩脉动。事实上,意法半导体的L6470获得了多达128步的微步操控。
这款数字电机操控驱动器的中心是一个能够下降微操控器资源占用率的数字运动引擎(DME)。
数字运动操控引擎是由行为指令操控,例如,肯定方位恳求,并依照预设转速曲线鸿沟驱动电机运动。悉数指令集包含相对方位和肯定方位(到达方针方位)、转速盯梢(到达并坚持方针转速)和电机中止次序,还包含机械方位传感器办理专用指令。图2所示是前述部分指令。
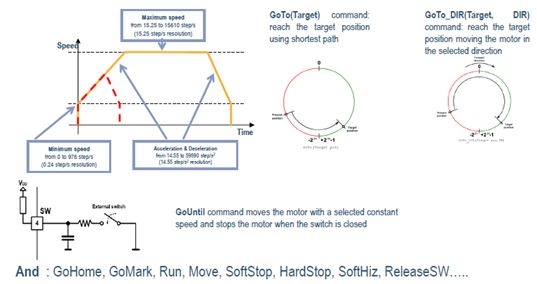
图2:行为指令
该操控器经过具有菊花链功用的高速SPI总线接口与主微操控器通讯。
经过一个串行接口,一个微操控器能够办理多个操控器,然后操控多台步进电机,如图3所示。
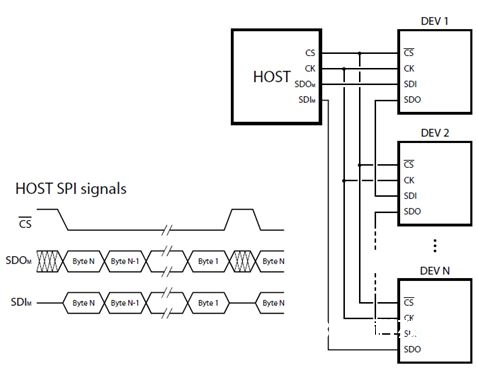
图3:SPI接口菊花链拓扑
除反电动势外,其它需求补偿的参数
除反电动势外,其它需求补偿的参数包含相电流、相电阻和电源电压。
跟着电机变热,相电阻将会发生改变,然后直接影响相电流。KTHERM设置用于补偿这个无用行为的影响。微操控器软件可监督电机温度上升,核算KTHERM值,如图4所示。
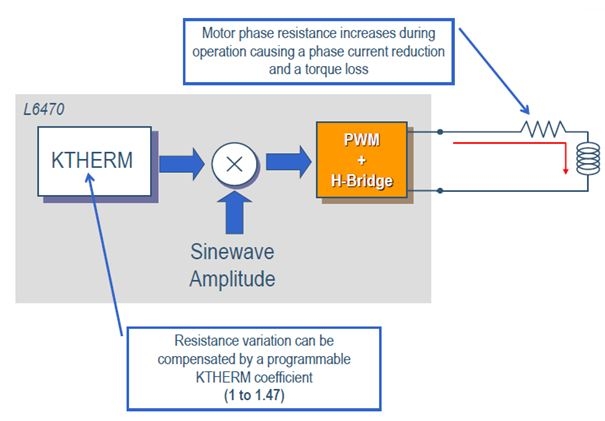
图4:相电阻改变补偿
当运用非稳压电源时,在电源电压与电机驱动电路之间有很多的纹波电压,当电源电压改变时,电机电流也随之改变。假如电源纹波电压过大,当电机电流降得太低时,电机有可能会失速,因而,需求补偿电源电压改变的影响,如下图所示。以L6470为例,芯片内部模数转换器担任丈量电源电压,数字内核算法担任算出合适的补偿系数,并将其运用到PWM占空比,使输出电压在电源电压改变期间坚持稳定,如图5所示。
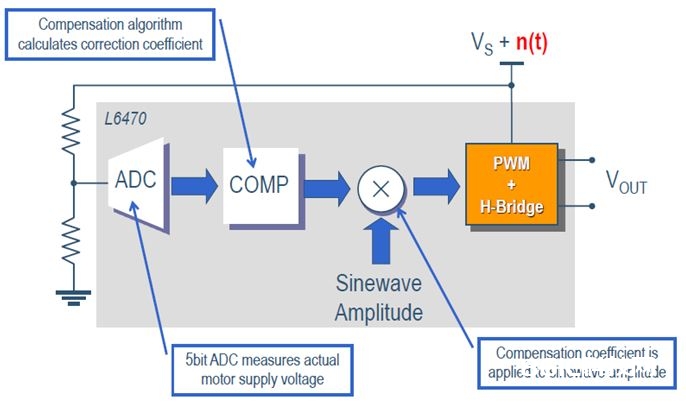
图5:电源电压补偿
意法半导体的电流式操控驱动器选用同一个数字运动引擎(DME)办法,为规划人员供给一个完好的数字运动操控产品组合。
意法半导体的L6470和L6472都是选用这些立异技能的电机驱动器,只不过L6470是一款电压式操控驱动器,而L6472则是一款电流操控式解决方案。
L6470可获得最高128步的操控精度。
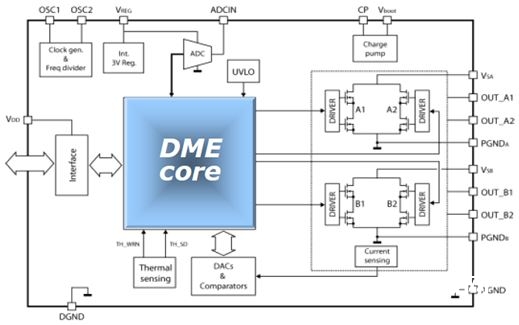
图6:L6470框图
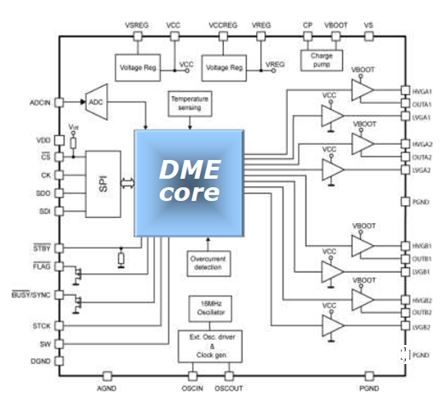
图7:L6482框图
L6480和 L6482分别是独立的电压式和电流式操控器,片上没有集成功率级,合作外接MOSFET或IGBT,能够驱动电流更大的电机,并且这种办法还能获得超卓的耗散功率。
此外,意法半导体还推出了新产品PowerSTEP01的样片,该产品选用体系封装,集成数字运动操控器(DME)和8个分立功率MOSFET管。






