


1 导言
跟着信息技术的开展,不间断应急电源(UPS)向着数字化、智能化、网络化、大容量多机冗余化和绿色化的方向开展。高功用专用DSP芯片为UPS的数字化供给了杰出的硬件根底,而嵌入式实时软件操作体系是数字化产品的中心。
针对数字化UPS,本文给出了一种依据实时多使命操作体系μC/OS-II 的体系操控规划。规划选用μC/OS-II为内核,完结其在TMS320LF2407A上的移植,经过对UPS操控体系结构与功用的剖析,各部分操控功用划分为不同优先级的使命来调度完结,给出了部分参数设定和主程序清单。实践证明,依据μC/OS-II 的数字化UPS 体系进步了操控体系的实时性以及体系运转的可靠性及稳定性。
2 数字化UPS操控体系结构
TMS320LF2407A 是TI 推出的专门针对工业操控范畴的16 位高功用微操控器,其运算速度高、片内资源丰富,可以很好的满意数字化UPS电源操控体系功用的需求。数字化UPS 体系整体规划框图如图1 所示,虚线框内为主操控模块,按功用划分为A/D转化、PWM(Pulse Wide Modulate)逆变操控、锁相操控、维护操控、键盘及液晶显现、通讯接口、实时时钟等功用模块。
4 数字化UPS使命规划及调度
操控软件主程序流程图如图3 所示。经过对UPS操控体系结构与功用的剖析,各部分操控功用划分为不同优先级的使命,由μC/OS-II实时内核进行调度,完结多使命并行履行。
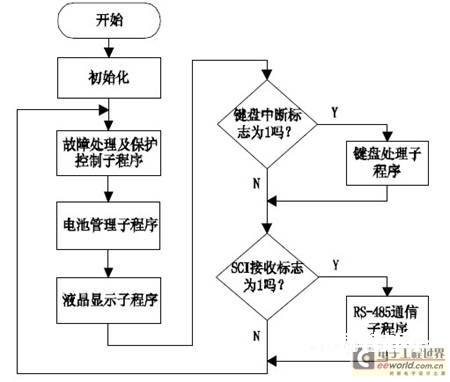
图 3 主程序流程图
(1)数字化UPS 使命规划:如表1 所示,选用层次化、模块化的规划思维,依据各个使命的重要性和实时性,把用户程序分红9 个不同优先级的使命,包含数据收集及PWM 波核算、锁相同步、通讯处理、体系参数核算、体系状况检测及处理、键盘扫描、键盘处理、液晶显现、闲暇使命。使命越重要,实时性越强,使命优先级越高。闲暇使命不履行任何功用,一向处于安排妥当状况,只要其他使命闲暇时才履行。
表1 数字化UPS使命功用及其描绘

(2) μC/OS-II 使命调度:完结使命在运转态、安排妥当态、挂起态、休眠态以及中止态之间的转化,是实时多使命操作体系运作的中心功用,流程如图4所示。μC/OS-II 的使命调度是依据优先级的抢占式调度算法,体系共有9个使命和3个中止。体系在使命操控块(OS_TCB)中分配一个字(OSTCBPrio)来表明每个使命的优先级,数值越小优先级越高。当产生使命调度时,体系经过使命安排妥当表查找到优先级最高的使命后,调用函数OS_TASK_SW()完结使命切换。
(3) 数字化UPS 中止:规划3 个硬件中止,一个是AD 采样中止,优先级最高,选用自适应频率方法每周期采样32 个点;另一个是体系时钟节拍中止,优先级次之,每10ms中止一次作为体系时钟;最终是通讯中止,优先级低,当接纳到外部数据时,便产生中止并对接纳的数据进行处理。
(4)使命间通讯与同步:选用访问共享数据资源的方法完结多使命间的通讯,选用信号量进行使命间的同步。为完结使命间的同步,本软件体系建立了3个信号量:
数据核算信号量OSPWMCntSem,用于使命1和数据收集PWM 波核算子程序通讯。每完结一次中止采样便宣布这个信号量,告知使命1对 收集数据和PWM波进行核算处理。
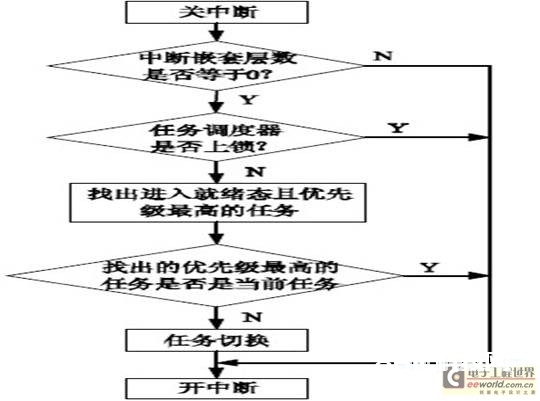
图4 使命调度流程图。
通讯信号量OSComSem,用于使命3 和通讯中止子程序进行通讯。一旦接纳到上位机发过来的信号,中止子程序就宣布这个信号量,告知使命4对接纳数据进行处理。
键盘信号量OSKeySem,用于使命6 和使命7 通讯,一旦扫描到有键按下则宣布该信号量告知使命7做键盘处理。
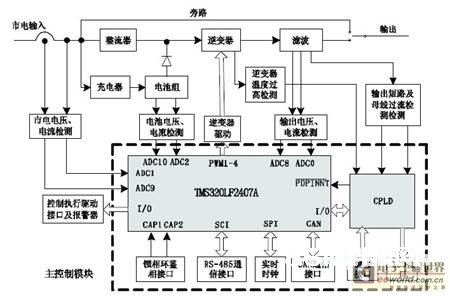
图 1 数字化UPS体系整体框图
(1)A/D转化:完结对市电输入的沟通电压、电流信号、逆变输出的沟通电压、电流信号、电池电压和电流信号的采样,是体系数字化操控完结以及UPS长途监控功用的根底。依据LF2407A A/D转化电平要求,被采样信号有必要经过信号检测模块改换为0~3V直流电平。为进步体系功用,对输入/输出电压、电流进行瞬时值采样,采样频率为10kHz.
(2) PWM 逆变操控:PWM 逆变操控算法是UPS体系操控的中心算法,它决议了UPS体系输出功用。
逆变算法使用LF2407A 强壮的数值运算功用以及高速核算才能实时在线核算出PWM信号脉宽,然后由A事情办理模块(EVA)的全比较单元输出4 路带死区操控的PWM 信号(PWM1~4),这4 路PWM 信号经阻隔驱动模块驱动逆变器。
(3) 锁相操控接口:使用LF2407A的事情捕获端口CAP1 和CAP2,将市电输入和逆变输出经降压及波形改换后送入CAP1 和CAP2,由LF2407A 经过软件锁相环算法完结逆变输出电压与市电电压的同频同相。
(4) 通讯接口:为完结对UPS 的实时监控功用,主机需对UPS电源的各模仿参量采样数据及表明作业状况的开关量数据进行实时高速收集。使用LF2407A的SCI 异步通讯接口,选用RS-485 物理规范协议,完结UPS与主机的长途通讯,以便对UPS设备状况、各项参数及毛病信息进行查询。
(5) 键盘操作及液晶显现:供给人机对话渠道,用户经过键盘操作可设置运转形式、设备通讯地址等信息;液晶显现屏以图文方法显现作业状况和参数信息,供给可视化菜单。
(6) 实时时钟:使用串行外设接口SPI 完结与LF2407A操控器的通讯,为整个体系供给一致、规范的时钟基准,别的,使用时钟芯片的存储器来存储体系掉电维护参数。






