


1、 导言
V2XE是一种以集成微处理器作为操控和接口的新式2轴罗盘和大地磁场传感器,U2XE运用新式体系常用的3V作业电源,具有功耗低、尺度小、在各种条件下的抗噪声能力强、较大的丈量活络感应区等长处。V2XE结合了PNI公司专利的磁场感应传感器和丈量电路技能,不受补偿漂移的影响,在不同温度下的丈量成果很安稳。V2XE经过简略易行的规范SPI接口输入/输出数据。
2、 功用特色
V2XE的典型特性如下:
功率低(3V DC,2mA输出);
封装尺度小(25.4mm×5.4mm×11.5mm);
高地磁感应(0.01°);
高地磁精度(2.0°);
数字接口输出(3V规范SPI接口);
具有高的磁场感应(0.00015Gauss);
具有大的磁场量程(±11Gauss)。
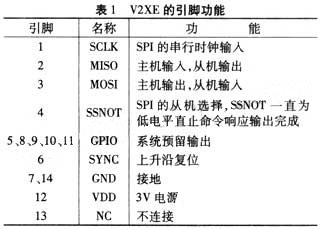
V2XE的引脚功用如表1所列。
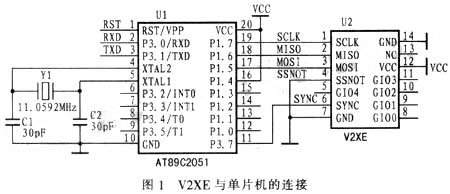
将V2XE使用于GPS体系,用AT89C2051读取V2XE的丈量数据,经过串口将数据传送到GPS处理器,图1示出V2XE连接到单片机的原理图。因为AT89C2051没有规范的SPI口输出[2],故分别用P1.7、P1.6和P1.5来模仿SCLK、MISO及MOSI端。V2XE的复位引脚SYNC由P3.7脚操控,SSNOT接地,V2XE作业在从机形式。
3、 数据格局和指令字
V2XE有Big Endian和Little Endian两种数据格局。Big Endian类型数据是从高位到低位寄存,Little Editan数据是倒序寄存,即在最高8位顺次放最低8位的数据,在最低8位顺次放最高8位的数据。如图2所示。

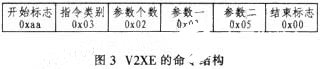
带有数据的指令格局由开端标志(Sync Flay)、指令类别(Frame Type)和完毕标志(Terminator)组成,图3所示是一个带有参数Heading(0X02)和Magnitude(0X05)的SetDataComponents(0X03)指令构成。V2XE常用指令字包含GetModInfo、ModInfoResp、SetDataComponent、GetData、DataResp、Setconfig、GetConfig、ConfigResp和SaveConfig。其指令码和功用如表2所示。

4 、编程实例
SPI接口的数据接纳和发送是同步的。V2XE每接纳一个数据时将会宣布0X00。当V2XE发送指令的应对时,它将不处理任何输入的数据,因而,在主机获取V2XE数据时,应是发送和接纳一起进行。用C言语编写发送-接纳函数SPITransmit如下:

一个V2XE体系的典型使用流程如图4所示。
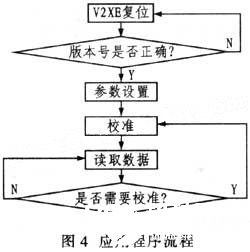
V2XE出厂时,都在其ROM中固化了芯片的版本号。用户第一次使用V2XE体系可首要读出该版本号以判别器材是否正常作业,可先向V2XE发送指令GetModInfo,然后读取回来值ModInfoResp,其程序如下:
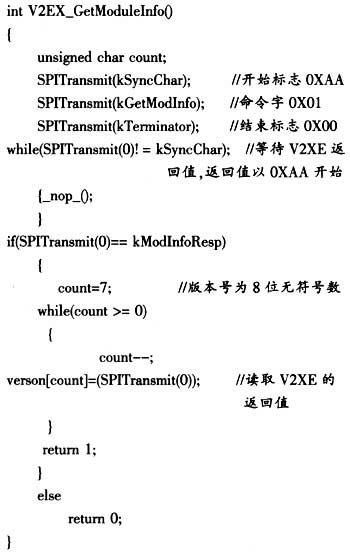
这样,取得的芯片信息寄存在数组verson中,能够依据读取的值和实践版本号(V2XEV201)比照以确认体系是否正常作业,假如体系正常,首要要依据需求设置回来数据格局以确认V2XE回来这些用户感兴趣的值,首要包含地磁方向角、磁场强度、温度和校准状况位等。别的,还要设置一些初始化参数,首要包含Declination(本地的地磁角,能够从http://www.ngdc.noaa.gov/cgi-bin/seg/gmag/fldsnth1.pl取得)、True North(设置参照视点为地磁北[3])、Big Endian(挑选数据的大、小形式)、Dampingsize(数据缓冲区,将缓冲区里的数据均匀后作为V2XE的实践输出)。
在V2XE的实践使用中,常常需求校准,常用指令包含StartCal、StopCal、GetCalData、CalDataResp和SetCalData,其指令代码和功用描绘如表3所示。在规范过程中,V2XE设备要尽量水平放置,从开端校准到完毕校准过程中需将设备原地旋转两周。每转的时刻不得小于30s,校准完结后,能够查询参数calstate来判别校准是否成功,完结参数设置和校准等初始化作业后,能够经过发送指令GetData(0x04)来获取V2XE的数据,对V2XE每发送指令一次有必要将其输出悉数读出。否则会影响下一次的正常输出。
5 、完毕语
该体系现已成功使用于手持GPS定位导航产品中,在室温下,其丈量方向角误差2°内,丈量的温度误差也小于1℃,地磁传感器V2XE以其接口简略、功耗低、体积小和软件设计简略等长处在GPS定位和磁场检测等方面有着宽广的使用远景。
责任编辑:gt






